Note
Go to the end to download the full example code.
Bolt Pretension#
This example demonstrates how to insert a Static Structural analysis into a new Mechanical session and execute a sequence of Python scripting commands that define and solve a bolt-pretension analysis. Scripts then evaluate the following results: deformation, equivalent stresses, contact, and bolt
Import necessary libraries#
import os
from PIL import Image
import ansys.mechanical.core as mech
from ansys.mechanical.core.examples import delete_downloads, download_file
from matplotlib import image as mpimg
from matplotlib import pyplot as plt
from matplotlib.animation import FuncAnimation
Embed mechanical and set global variables
app = mech.App(version=241)
globals().update(mech.global_variables(app, True))
print(app)
cwd = os.path.join(os.getcwd(), "out")
def display_image(image_name):
plt.figure(figsize=(16, 9))
plt.imshow(mpimg.imread(os.path.join(cwd, image_name)))
plt.xticks([])
plt.yticks([])
plt.axis("off")
plt.show()
/usr/local/lib/python3.9/dist-packages/clr_loader/mono.py:180: UserWarning: Hosting Mono versions before v6.12 is known to be problematic. If the process crashes shortly after you see this message, try updating Mono to at least v6.12.
warnings.warn(
Ansys Mechanical [Ansys Mechanical Enterprise]
Product Version:241
Software build date: 11/27/2023 10:24:20
Configure graphics for image export#
ExtAPI.Graphics.Camera.SetSpecificViewOrientation(ViewOrientationType.Iso)
ExtAPI.Graphics.Camera.SetFit()
image_export_format = GraphicsImageExportFormat.PNG
settings_720p = Ansys.Mechanical.Graphics.GraphicsImageExportSettings()
settings_720p.Resolution = GraphicsResolutionType.EnhancedResolution
settings_720p.Background = GraphicsBackgroundType.White
settings_720p.Width = 1280
settings_720p.Height = 720
settings_720p.CurrentGraphicsDisplay = False
ExtAPI.Graphics.Camera.Rotate(180, CameraAxisType.ScreenY)
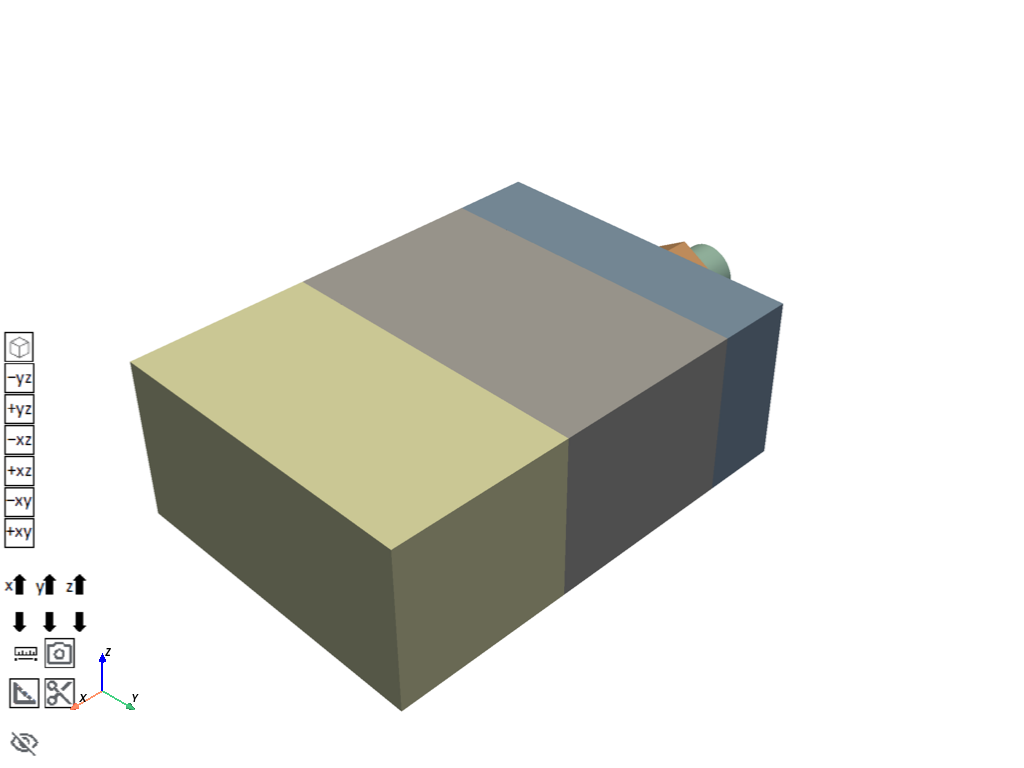
Download and import geometry#
Download the geometry file
geometry_path = download_file(
"example_06_bolt_pret_geom.agdb", "pymechanical", "00_basic"
)
Import geometry
geometry_import_group = Model.GeometryImportGroup
geometry_import = geometry_import_group.AddGeometryImport()
geometry_import_format = (
Ansys.Mechanical.DataModel.Enums.GeometryImportPreference.Format.Automatic
)
geometry_import_preferences = Ansys.ACT.Mechanical.Utilities.GeometryImportPreferences()
geometry_import_preferences.ProcessNamedSelections = True
geometry_import.Import(
geometry_path, geometry_import_format, geometry_import_preferences
)
ExtAPI.Graphics.Camera.SetFit()
ExtAPI.Graphics.ExportImage(
os.path.join(cwd, "geometry.png"), image_export_format, settings_720p
)
display_image("geometry.png")
Download and import material#
Download materials
mat_Copper_file_path = download_file(
"example_06_Mat_Copper.xml", "pymechanical", "00_basic"
)
mat_Steel_file_path = download_file(
"example_06_Mat_Steel.xml", "pymechanical", "00_basic"
)
Import materials
MAT = ExtAPI.DataModel.Project.Model.Materials
MAT.Import(mat_Copper_file_path)
MAT.Import(mat_Steel_file_path)
Define Analysis and unit system#
Add Structural analysis
Model.AddStaticStructuralAnalysis()
STAT_STRUC = Model.Analyses[0]
STAT_STRUC_SOLN = STAT_STRUC.Solution
STAT_STRUC_ANA_SETTING = STAT_STRUC.Children[0]
Set up the unit system.
ExtAPI.Application.ActiveUnitSystem = MechanicalUnitSystem.StandardNMM
Store all main tree nodes as variables
MODEL = ExtAPI.DataModel.Project.Model
GEOM = ExtAPI.DataModel.Project.Model.Geometry
CONN_GRP = ExtAPI.DataModel.Project.Model.Connections
CS_GRP = ExtAPI.DataModel.Project.Model.CoordinateSystems
MSH = ExtAPI.DataModel.Project.Model.Mesh
NS_GRP = ExtAPI.DataModel.Project.Model.NamedSelections
Store named selections
block3_block2_cont_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block3_block2_cont"
][0]
block3_block2_targ_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block3_block2_targ"
][0]
shank_block3_targ_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_block3_targ"
][0]
shank_block3_cont_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_block3_cont"
][0]
block1_washer_cont_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block1_washer_cont"
][0]
block1_washer_targ_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block1_washer_targ"
][0]
washer_bolt_cont_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "washer_bolt_cont"
][0]
washer_bolt_targ_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "washer_bolt_targ"
][0]
shank_bolt_targ_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_bolt_targ"
][0]
shank_bolt_cont_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_bolt_cont"
][0]
block2_block1_cont_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block2_block1_cont"
][0]
block2_block1_targ_NS = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block2_block1_targ"
][0]
all_bodies = [x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "all_bodies"][0]
bodies_5 = [x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "bodies_5"][0]
shank = [x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank"][0]
shank_face = [x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_face"][0]
shank_face2 = [x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_face2"][
0
]
bottom_surface = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "bottom_surface"
][0]
block2_surface = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "block2_surface"
][0]
shank_surface = [
x for x in ExtAPI.DataModel.Tree.AllObjects if x.Name == "shank_surface"
][0]
Assign material to bodies
SURFACE1 = GEOM.Children[0].Children[0]
SURFACE1.Material = "Steel"
SURFACE2 = GEOM.Children[1].Children[0]
SURFACE2.Material = "Copper"
SURFACE3 = GEOM.Children[2].Children[0]
SURFACE3.Material = "Copper"
SURFACE4 = GEOM.Children[3].Children[0]
SURFACE4.Material = "Steel"
SURFACE5 = GEOM.Children[4].Children[0]
SURFACE5.Material = "Steel"
SURFACE6 = GEOM.Children[5].Children[0]
SURFACE6.Material = "Steel"
Define coordinate system#
coordinate_systems_17 = Model.CoordinateSystems
coordinate_system_93 = coordinate_systems_17.AddCoordinateSystem()
coordinate_system_93.OriginDefineBy = CoordinateSystemAlignmentType.Fixed
coordinate_system_93.OriginX = Quantity(-195, "mm")
coordinate_system_93.OriginY = Quantity(100, "mm")
coordinate_system_93.OriginZ = Quantity(50, "mm")
coordinate_system_93.PrimaryAxis = CoordinateSystemAxisType.PositiveZAxis
Define Contacts#
Change contact settings
connections = ExtAPI.DataModel.Project.Model.Connections
Delete existing contacts
for connection in connections.Children:
if connection.DataModelObjectCategory == DataModelObjectCategory.ConnectionGroup:
connection.Delete()
CONT_REG1 = CONN_GRP.AddContactRegion()
CONT_REG1.SourceLocation = NS_GRP.Children[0]
CONT_REG1.TargetLocation = NS_GRP.Children[1]
CONT_REG1.ContactType = ContactType.Frictional
CONT_REG1.FrictionCoefficient = 0.2
CONT_REG1.SmallSliding = ContactSmallSlidingType.Off
CONT_REG1.UpdateStiffness = UpdateContactStiffness.Never
CMD1 = CONT_REG1.AddCommandSnippet()
Add missing contact keyopt and Archard Wear Model using a command snippet
AWM = """keyopt,cid,9,5
rmodif,cid,10,0.00
rmodif,cid,23,0.001"""
CMD1.AppendText(AWM)
CONTS = CONN_GRP.Children[0]
CONT_REG2 = CONTS.AddContactRegion()
CONT_REG2.SourceLocation = NS_GRP.Children[3]
CONT_REG2.TargetLocation = NS_GRP.Children[2]
CONT_REG2.ContactType = ContactType.Bonded
CONT_REG2.ContactFormulation = ContactFormulation.MPC
CONT_REG3 = CONTS.AddContactRegion()
CONT_REG3.SourceLocation = NS_GRP.Children[4]
CONT_REG3.TargetLocation = NS_GRP.Children[5]
CONT_REG3.ContactType = ContactType.Frictional
CONT_REG3.FrictionCoefficient = 0.2
CONT_REG3.SmallSliding = ContactSmallSlidingType.Off
CONT_REG3.UpdateStiffness = UpdateContactStiffness.Never
CMD3 = CONT_REG3.AddCommandSnippet()
# Add missing contact keyopt and Archard Wear Model using a command snippet
AWM3 = """keyopt,cid,9,5
rmodif,cid,10,0.00
rmodif,cid,23,0.001"""
CMD3.AppendText(AWM3)
CONT_REG4 = CONTS.AddContactRegion()
CONT_REG4.SourceLocation = NS_GRP.Children[6]
CONT_REG4.TargetLocation = NS_GRP.Children[7]
CONT_REG4.ContactType = ContactType.Bonded
CONT_REG4.ContactFormulation = ContactFormulation.MPC
CONT_REG5 = CONTS.AddContactRegion()
CONT_REG5.SourceLocation = NS_GRP.Children[9]
CONT_REG5.TargetLocation = NS_GRP.Children[8]
CONT_REG5.ContactType = ContactType.Bonded
CONT_REG5.ContactFormulation = ContactFormulation.MPC
CONT_REG6 = CONTS.AddContactRegion()
CONT_REG6.SourceLocation = NS_GRP.Children[10]
CONT_REG6.TargetLocation = NS_GRP.Children[11]
CONT_REG6.ContactType = ContactType.Frictional
CONT_REG6.FrictionCoefficient = 0.2
CONT_REG6.SmallSliding = ContactSmallSlidingType.Off
CONT_REG6.UpdateStiffness = UpdateContactStiffness.Never
CMD6 = CONT_REG6.AddCommandSnippet()
# Add missing contact keyopt and Archard Wear Model using a command snippet
AWM6 = """keyopt,cid,9,5
rmodif,cid,10,0.00
rmodif,cid,23,0.001"""
CMD6.AppendText(AWM6)
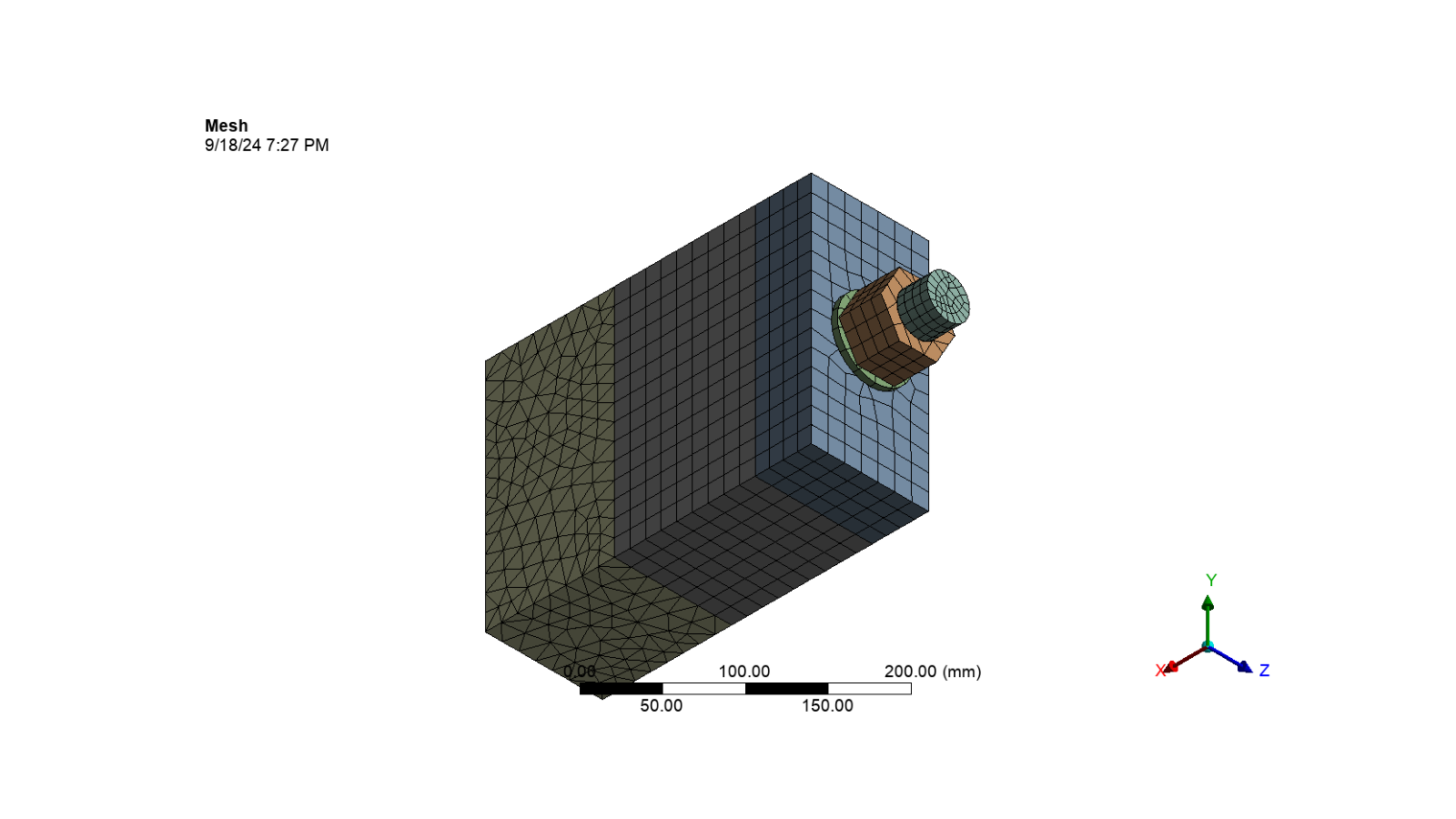
Mesh#
Hex_Method = MSH.AddAutomaticMethod()
Hex_Method.Location = all_bodies
Hex_Method.Method = MethodType.Automatic
BODY_SIZING1 = MSH.AddSizing()
BODY_SIZING1.Location = bodies_5
BODY_SIZING1.ElementSize = Quantity(15, "mm")
BODY_SIZING2 = MSH.AddSizing()
BODY_SIZING2.Location = shank
BODY_SIZING2.ElementSize = Quantity(7, "mm")
Face_Meshing = MSH.AddFaceMeshing()
Face_Meshing.Location = shank_face
Face_Meshing.MappedMesh = False
Sweep_Method = MSH.AddAutomaticMethod()
Sweep_Method.Location = shank
Sweep_Method.Method = MethodType.Sweep
Sweep_Method.SourceTargetSelection = 2
Sweep_Method.SourceLocation = shank_face
Sweep_Method.TargetLocation = shank_face2
MSH.Activate()
ExtAPI.Graphics.Camera.SetFit()
ExtAPI.Graphics.ExportImage(
os.path.join(cwd, "mesh.png"), image_export_format, settings_720p
)
display_image("mesh.png")
Analysis settings#
STAT_STRUC_ANA_SETTING.NumberOfSteps = 4
step_index_list = [1]
with Transaction():
for step_index in step_index_list:
STAT_STRUC_ANA_SETTING.SetAutomaticTimeStepping(
step_index, AutomaticTimeStepping.Off
)
STAT_STRUC_ANA_SETTING.Activate()
step_index_list = [1]
with Transaction():
for step_index in step_index_list:
STAT_STRUC_ANA_SETTING.SetNumberOfSubSteps(step_index, 2)
STAT_STRUC_ANA_SETTING.Activate()
STAT_STRUC_ANA_SETTING.SolverType = SolverType.Direct
STAT_STRUC_ANA_SETTING.SolverPivotChecking = SolverPivotChecking.Off
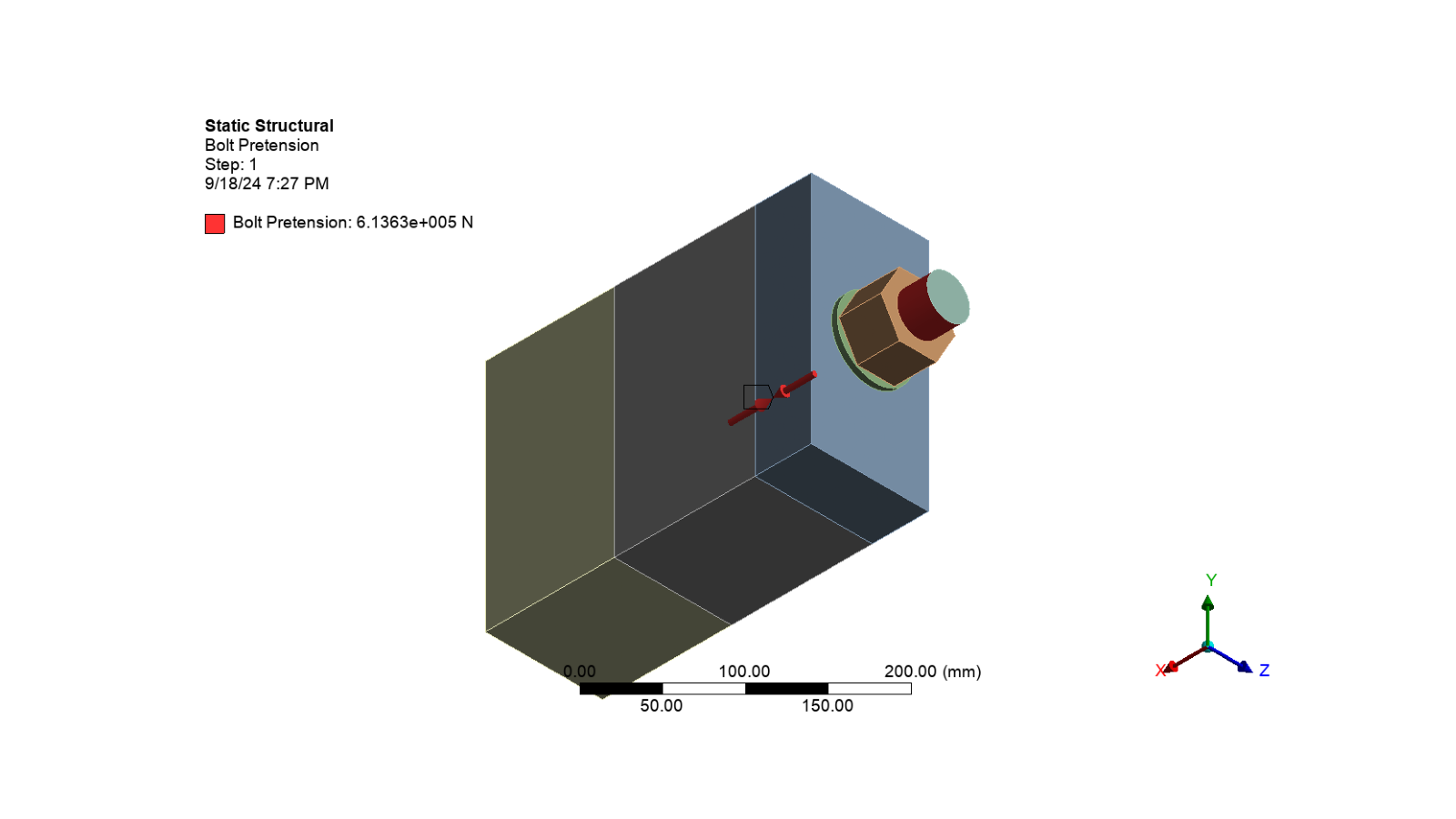
Define loads and boundary conditions#
FIX_SUP = STAT_STRUC.AddFixedSupport()
FIX_SUP.Location = block2_surface
Tabular_Force = STAT_STRUC.AddForce()
Tabular_Force.Location = bottom_surface
Tabular_Force.DefineBy = LoadDefineBy.Components
Tabular_Force.XComponent.Inputs[0].DiscreteValues = [
Quantity("0[s]"),
Quantity("1[s]"),
Quantity("2[s]"),
Quantity("3[s]"),
Quantity("4[s]"),
]
Tabular_Force.XComponent.Output.DiscreteValues = [
Quantity("0[N]"),
Quantity("0[N]"),
Quantity("5.e+005[N]"),
Quantity("0[N]"),
Quantity("-5.e+005[N]"),
]
Bolt_Pretension = STAT_STRUC.AddBoltPretension()
Bolt_Pretension.Location = shank_surface
Bolt_Pretension.Preload.Inputs[0].DiscreteValues = [
Quantity("1[s]"),
Quantity("2[s]"),
Quantity("3[s]"),
Quantity("4[s]"),
]
Bolt_Pretension.Preload.Output.DiscreteValues = [
Quantity("6.1363e+005[N]"),
Quantity("0 [N]"),
Quantity("0 [N]"),
Quantity("0[N]"),
]
Bolt_Pretension.SetDefineBy(2, BoltLoadDefineBy.Lock)
Bolt_Pretension.SetDefineBy(3, BoltLoadDefineBy.Lock)
Bolt_Pretension.SetDefineBy(4, BoltLoadDefineBy.Lock)
Tree.Activate([Bolt_Pretension])
ExtAPI.Graphics.ExportImage(
os.path.join(cwd, "loads_and_boundaryconditions.png"),
image_export_format,
settings_720p,
)
display_image("loads_and_boundaryconditions.png")
Insert results#
Post_Contact_Tool = STAT_STRUC_SOLN.AddContactTool()
Post_Contact_Tool.ScopingMethod = GeometryDefineByType.Worksheet
Bolt_Tool = STAT_STRUC_SOLN.AddBoltTool()
Bolt_Working_Load = Bolt_Tool.AddWorkingLoad()
Total_Deformation = STAT_STRUC_SOLN.AddTotalDeformation()
Equivalent_stress_1 = STAT_STRUC_SOLN.AddEquivalentStress()
Equivalent_stress_2 = STAT_STRUC_SOLN.AddEquivalentStress()
Equivalent_stress_2.Location = shank
Force_Reaction_1 = STAT_STRUC_SOLN.AddForceReaction()
Force_Reaction_1.BoundaryConditionSelection = FIX_SUP
Moment_Reaction_2 = STAT_STRUC_SOLN.AddMomentReaction()
Moment_Reaction_2.BoundaryConditionSelection = FIX_SUP
Solve#
STAT_STRUC_SOLN.Solve(True)
STAT_STRUC_SS = STAT_STRUC_SOLN.Status
Messages#
Messages = ExtAPI.Application.Messages
if Messages:
for message in Messages:
print(f"[{message.Severity}] {message.DisplayString}")
else:
print("No [Info]/[Warning]/[Error] Messages")
[Warning] There could be possible overconstraint between the bonded contacts which use the MPC formulation, to identify those overconstraint regions use the Contact Trackers or the Status under the Contact Tool.
[Info] All contact results of contacts with MPC formulation are zero since constraint equations are used to bond the mesh together. Review results of the parts underlying the contact surfaces for more information.
[Warning] One or more MPC or Lagrange Multiplier formulation based contact regions or remote boundary conditions may have conflicts with other applied boundary conditions or other contact or symmetry regions. This may reduce solution accuracy. For MPC based remote points, setting the relaxation method may help eliminate overconstraint. Tip: You may graphically display FE Connections from the Solution Information Object for non-cyclic analysis. Refer to Troubleshooting in the Help System for more details.
[Warning] At least one body has been found to have only 1 element in at least 2 directions along with reduced integration. This situation can lead to invalid results or solver pivot errors. Consider changing to full integration element control or meshing with more elements. Offending bodies can be identified by Right-clicking in the Geometry window and choose Go To -> Bodies With One Element Through the Thickness. Refer to Troubleshooting in the Help System for more details.
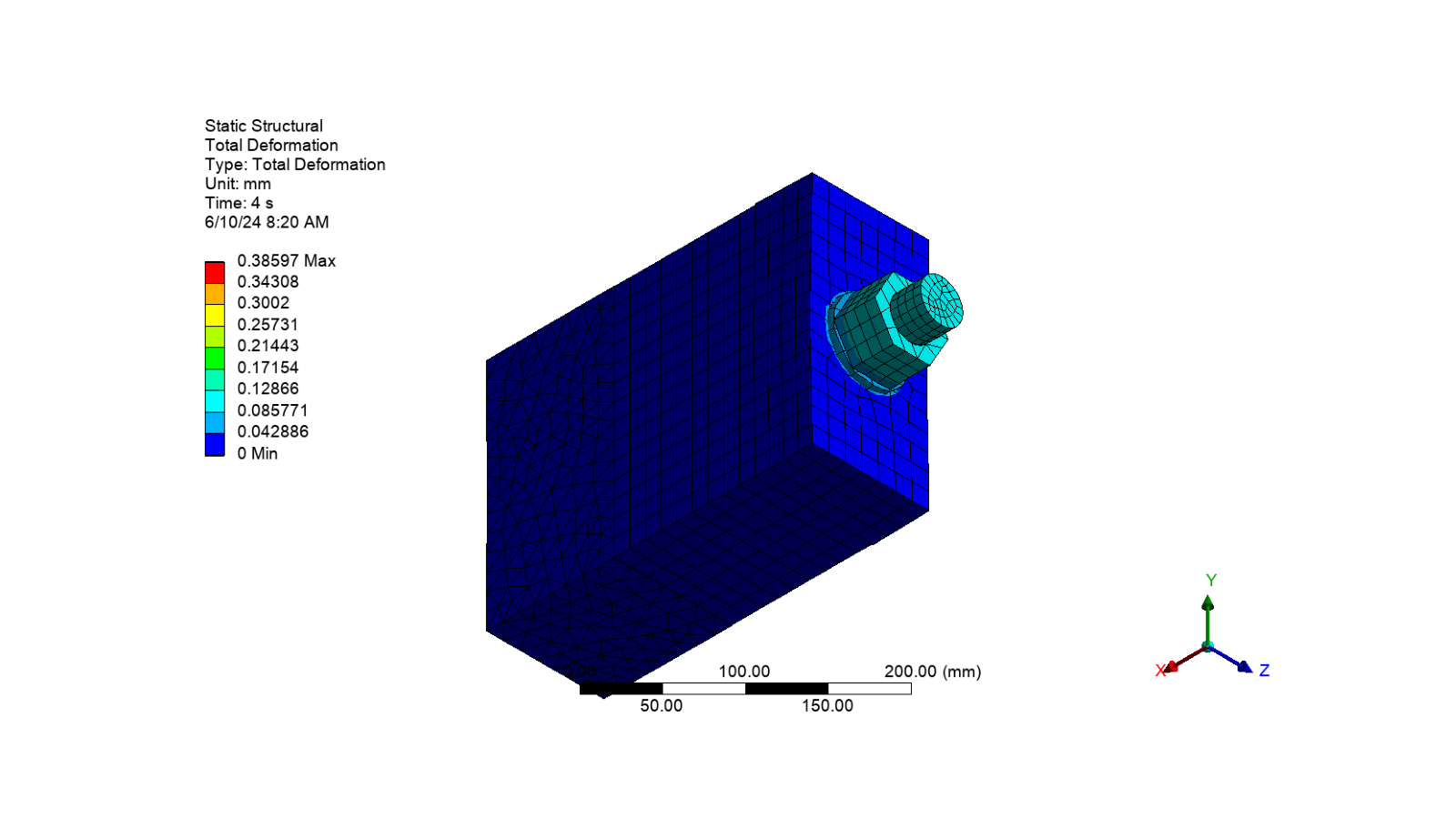
Results#
Total deformation
Tree.Activate([Total_Deformation])
ExtAPI.Graphics.Camera.SetFit()
ExtAPI.Graphics.ExportImage(
os.path.join(cwd, "total_deformation.png"), image_export_format, settings_720p
)
display_image("total_deformation.png")
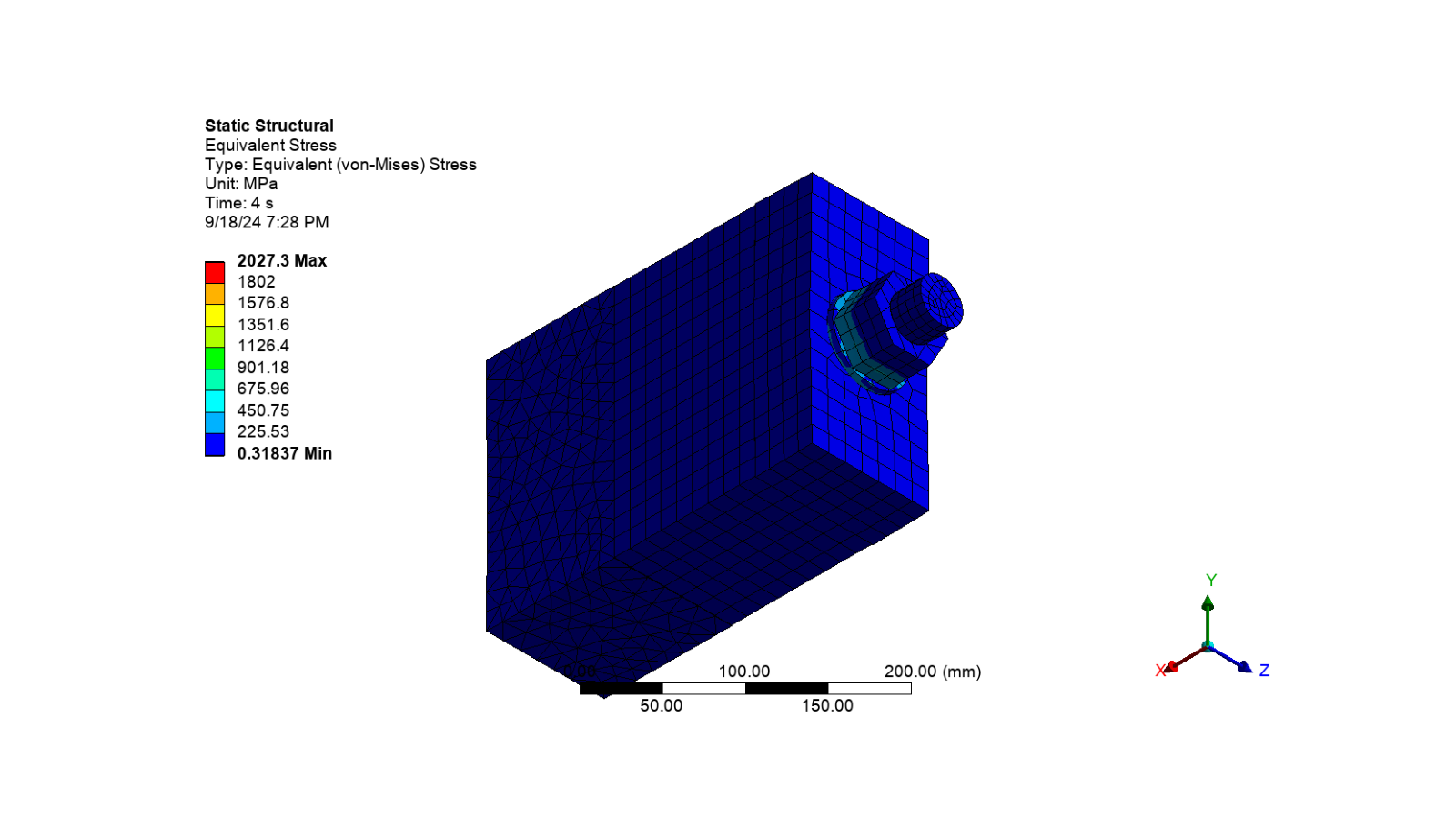
Equivalent stress on all bodies
Tree.Activate([Equivalent_stress_1])
ExtAPI.Graphics.Camera.SetFit()
ExtAPI.Graphics.ExportImage(
os.path.join(cwd, "equivalent_stress_total.png"), image_export_format, settings_720p
)
display_image("equivalent_stress_total.png")
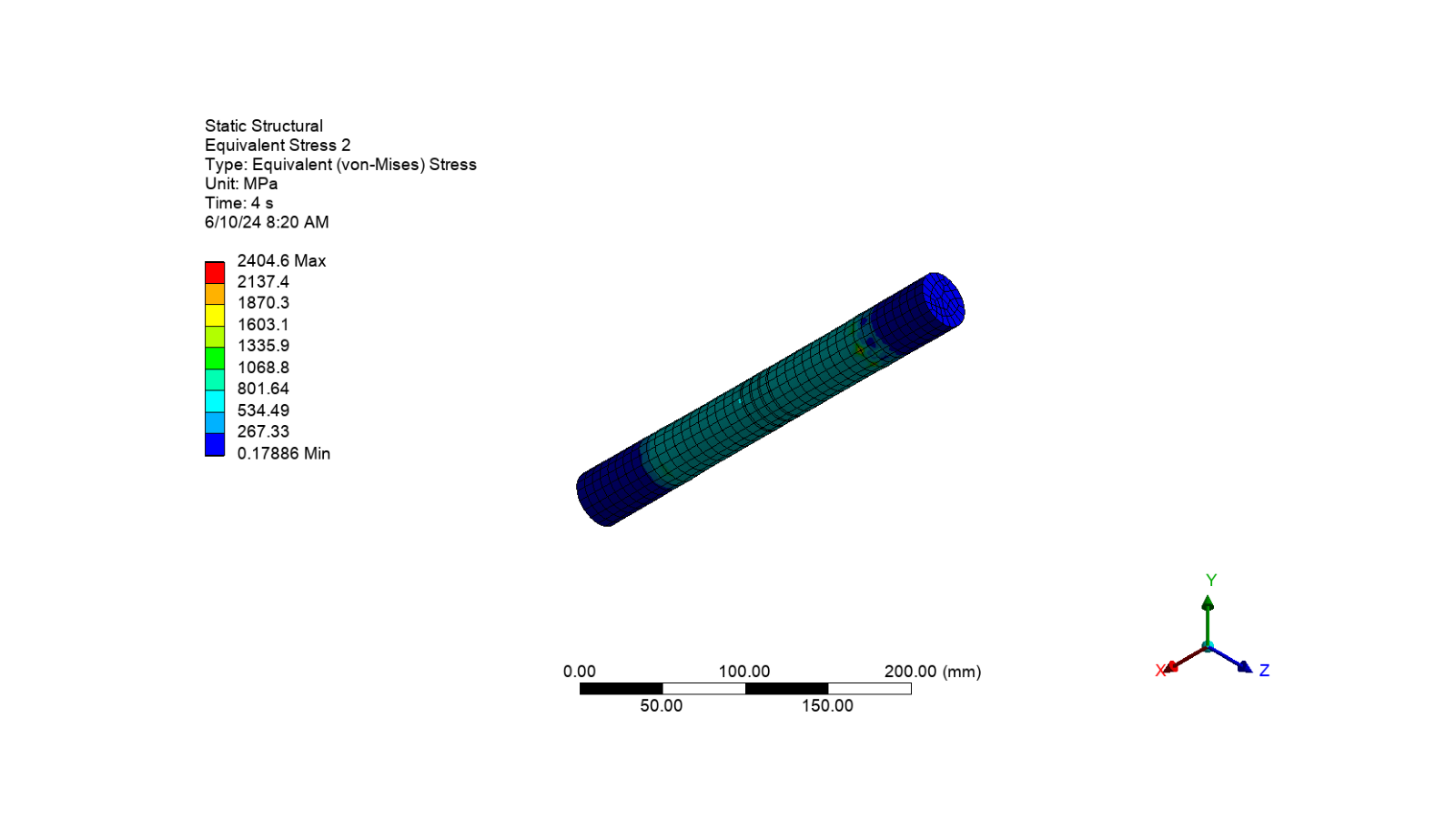
Equivalent stress on shank
Tree.Activate([Equivalent_stress_2])
ExtAPI.Graphics.Camera.SetFit()
ExtAPI.Graphics.ExportImage(
os.path.join(cwd, "equivalent_stress_shank.png"), image_export_format, settings_720p
)
display_image("equivalent_stress_shank.png")
Export contact status animation
Post_Contact_Tool_status = Post_Contact_Tool.Children[0]
Tree.Activate([Post_Contact_Tool_status])
ExtAPI.Graphics.Camera.SetFit()
animation_export_format = (
Ansys.Mechanical.DataModel.Enums.GraphicsAnimationExportFormat.GIF
)
settings_720p = Ansys.Mechanical.Graphics.AnimationExportSettings()
settings_720p.Width = 1280
settings_720p.Height = 720
Post_Contact_Tool_status.ExportAnimation(
os.path.join(cwd, "contact_status.gif"), animation_export_format, settings_720p
)
gif = Image.open(os.path.join(cwd, "contact_status.gif"))
fig, ax = plt.subplots(figsize=(16, 9))
ax.axis("off")
img = ax.imshow(gif.convert("RGBA"))
def update(frame):
gif.seek(frame)
img.set_array(gif.convert("RGBA"))
return [img]
ani = FuncAnimation(
fig, update, frames=range(gif.n_frames), interval=200, repeat=True, blit=True
)
plt.show()
Project tree#
def print_tree(node, indentation=""):
print(f"{indentation}├── {node.Name}")
if (
hasattr(node, "Children")
and node.Children is not None
and node.Children.Count > 0
):
for child in node.Children:
print_tree(child, indentation + "| ")
root_node = DataModel.Project
print_tree(root_node)
├── Project
| ├── Model
| | ├── Geometry Imports
| | | ├── Geometry Import
| | ├── Geometry
| | | ├── Solid
| | | | ├── Solid
| | | ├── Solid
| | | | ├── Solid
| | | ├── Solid
| | | | ├── Solid
| | | ├── Solid
| | | | ├── Solid
| | | ├── Solid
| | | | ├── Solid
| | | ├── Solid
| | | | ├── Solid
| | ├── Materials
| | | ├── Structural Steel
| | | ├── Copper
| | | ├── Steel
| | ├── Coordinate Systems
| | | ├── Global Coordinate System
| | | ├── Coordinate System
| | ├── Remote Points
| | ├── Connections
| | | ├── Connection Group
| | | | ├── Contact Region
| | | | | ├── Commands (APDL)
| | | | ├── Contact Region 2
| | | | ├── Contact Region 3
| | | | | ├── Commands (APDL)
| | | | ├── Contact Region 4
| | | | ├── Contact Region 5
| | | | ├── Contact Region 6
| | | | | ├── Commands (APDL)
| | ├── Mesh
| | | ├── Automatic Method
| | | ├── Body Sizing
| | | ├── Body Sizing 2
| | | ├── Face Meshing
| | | ├── Sweep Method
| | ├── Named Selections
| | | ├── block3_block2_cont
| | | ├── block3_block2_targ
| | | ├── shank_block3_targ
| | | ├── shank_block3_cont
| | | ├── block1_washer_cont
| | | ├── block1_washer_targ
| | | ├── washer_bolt_cont
| | | ├── washer_bolt_targ
| | | ├── shank_bolt_targ
| | | ├── shank_bolt_cont
| | | ├── block2_block1_cont
| | | ├── block2_block1_targ
| | | ├── all_bodies
| | | ├── bodies_5
| | | ├── shank
| | | ├── shank_face
| | | ├── shank_face2
| | | ├── bottom_surface
| | | ├── block2_surface
| | | ├── shank_surface
| | ├── Static Structural
| | | ├── Analysis Settings
| | | ├── Fixed Support
| | | ├── Force
| | | ├── Bolt Pretension
| | | ├── Solution
| | | | ├── Solution Information
| | | | ├── Total Deformation
| | | | ├── Equivalent Stress
| | | | ├── Equivalent Stress 2
| | | | ├── Contact Tool
| | | | | ├── Status
| | | | ├── Force Reaction
| | | | ├── Moment Reaction
| | | | ├── Bolt Tool
| | | | | ├── Adjustment
| | | | | ├── Working Load
Cleanup#
Save project
app.save(os.path.join(cwd, "bolt_pretension.mechdat"))
app.new()
Delete the example file
delete_downloads()
True
Total running time of the script: (1 minutes 32.515 seconds)