Note
Go to the end to download the full example code.
Modal acoustics analysis#
This example demonstrate modal acoustic analysis that involves modeling both a structure and the surrounding fluid to analyze frequencies and standing wave patterns within the structure. This type of analysis is essential for applications such as Sonar, concert hall design, noise reduction in various settings, audio speaker design, and geophysical exploration.
Mechanical enables you to model pure acoustic problems and fluid-structure interaction (FSI) problems. A coupled acoustic analysis accounts for FSI. An uncoupled acoustic analysis simulates the fluid only and ignores any fluid-structure interaction.
Import the necessary libraries#
from pathlib import Path
from typing import TYPE_CHECKING
from PIL import Image
from ansys.mechanical.core import App
from ansys.mechanical.core.examples import delete_downloads, download_file
from matplotlib import image as mpimg
from matplotlib import pyplot as plt
from matplotlib.animation import FuncAnimation
if TYPE_CHECKING:
import Ansys
Initialize the embedded application#
app = App(globals=globals())
print(app)
Ansys Mechanical [Ansys Mechanical Enterprise]
Product Version:252
Software build date: 06/13/2025 11:25:56
Create functions to set camera and display images#
# Set the path for the output files (images, gifs, mechdat)
output_path = Path.cwd() / "out"
def set_camera_and_display_image(
camera,
graphics,
graphics_image_export_settings,
image_output_path: Path,
image_name: str,
set_fit: bool = False,
) -> None:
"""Set the camera to fit the model and display the image.
Parameters
----------
camera : Ansys.ACT.Common.Graphics.MechanicalCameraWrapper
The camera object to set the view.
graphics : Ansys.ACT.Common.Graphics.MechanicalGraphicsWrapper
The graphics object to export the image.
graphics_image_export_settings : Ansys.Mechanical.Graphics.GraphicsImageExportSettings
The settings for exporting the image.
image_output_path : Path
The path to save the exported image.
image_name : str
The name of the exported image file.
set_fit: bool, Optional
If True, set the camera to fit the mesh.
If False, do not set the camera to fit the mesh.
"""
if set_fit:
# Set the camera to fit the mesh
camera.SetFit()
# Export the mesh image with the specified settings
image_path = image_output_path / image_name
graphics.ExportImage(
str(image_path), image_export_format, graphics_image_export_settings
)
# Display the exported mesh image
display_image(image_path)
def display_image(
image_path: str,
pyplot_figsize_coordinates: tuple = (16, 9),
plot_xticks: list = [],
plot_yticks: list = [],
plot_axis: str = "off",
) -> None:
"""Display the image with the specified parameters.
Parameters
----------
image_path : str
The path to the image file to display.
pyplot_figsize_coordinates : tuple
The size of the figure in inches (width, height).
plot_xticks : list
The x-ticks to display on the plot.
plot_yticks : list
The y-ticks to display on the plot.
plot_axis : str
The axis visibility setting ('on' or 'off').
"""
# Set the figure size based on the coordinates specified
plt.figure(figsize=pyplot_figsize_coordinates)
# Read the image from the file into an array
plt.imshow(mpimg.imread(image_path))
# Get or set the current tick locations and labels of the x-axis
plt.xticks(plot_xticks)
# Get or set the current tick locations and labels of the y-axis
plt.yticks(plot_yticks)
# Turn off the axis
plt.axis(plot_axis)
# Display the figure
plt.show()
Configure the graphics for image export#
graphics = app.Graphics
camera = graphics.Camera
# Set the camera orientation to isometric view
camera.SetSpecificViewOrientation(ViewOrientationType.Iso)
# Set the image export format and settings
image_export_format = GraphicsImageExportFormat.PNG
settings_720p = Ansys.Mechanical.Graphics.GraphicsImageExportSettings()
settings_720p.Resolution = GraphicsResolutionType.EnhancedResolution
settings_720p.Background = GraphicsBackgroundType.White
settings_720p.Width = 1280
settings_720p.Height = 720
settings_720p.CurrentGraphicsDisplay = False
Download the geometry and material files#
# Download the geometry file from the ansys/example-data repository
geometry_path = download_file("sloshing_geometry.agdb", "pymechanical", "embedding")
# Download the water material file from the ansys/example-data repository
mat_path = download_file("Water_material_explicit.xml", "pymechanical", "embedding")
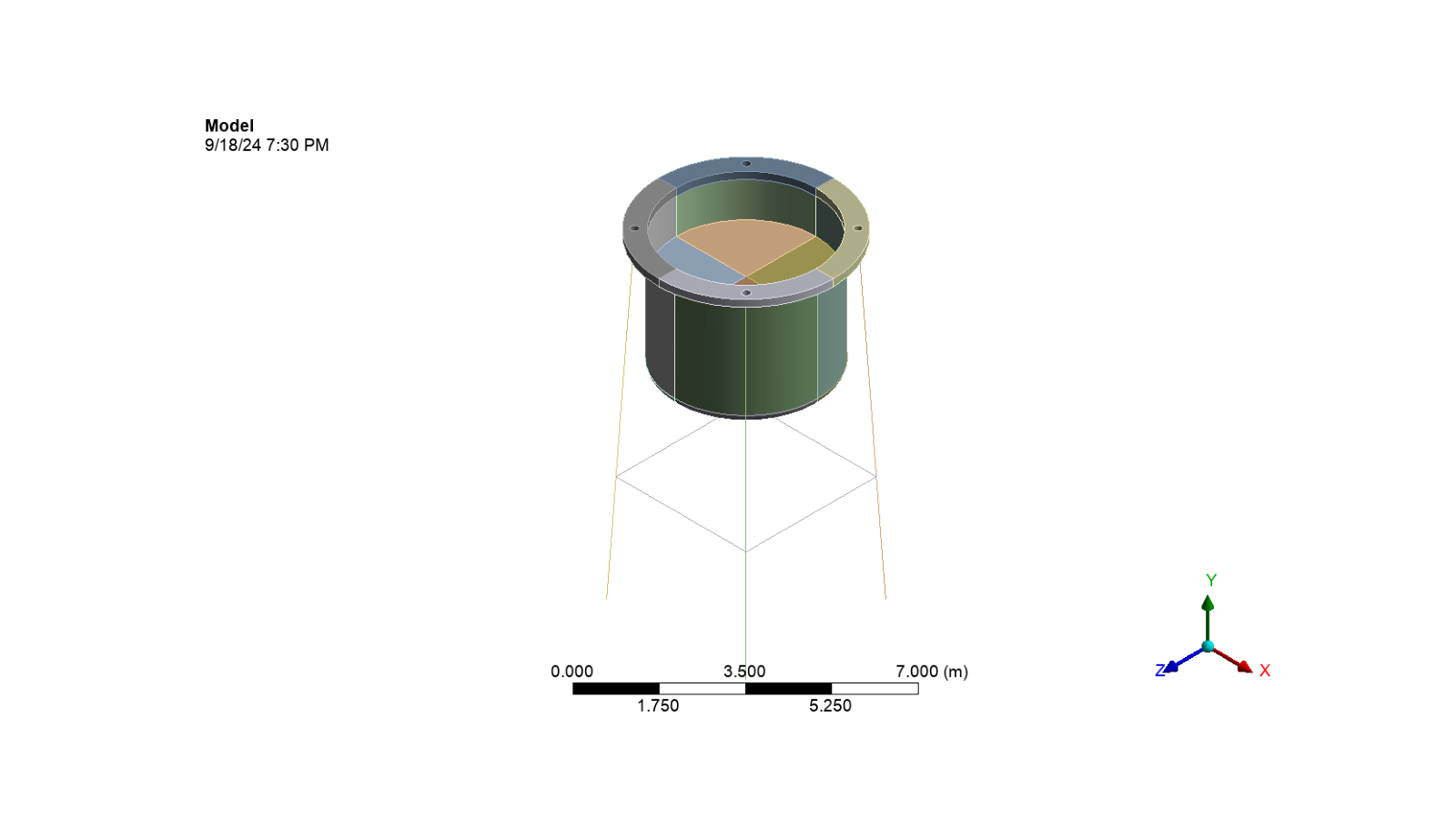
Import and display the geometry#
# Define the model
model = app.Model
# Add the geometry import group and set its preferences
geometry_import_group = model.GeometryImportGroup
geometry_import = geometry_import_group.AddGeometryImport()
geometry_import_format = (
Ansys.Mechanical.DataModel.Enums.GeometryImportPreference.Format.Automatic
)
geometry_import_preferences = Ansys.ACT.Mechanical.Utilities.GeometryImportPreferences()
geometry_import_preferences.ProcessNamedSelections = True
# Import the geometry file with the specified format and preferences
geometry_import.Import(
geometry_path, geometry_import_format, geometry_import_preferences
)
# Set the camera to fit the model and display the image
set_camera_and_display_image(
camera, graphics, settings_720p, output_path, "geometry.png", set_fit=True
)
Store all variables necessary for analysis#
geometry = model.Geometry
mesh = model.Mesh
named_selections = model.NamedSelections
connections = model.Connections
materials = model.Materials
Add modal acoustic analysis and import the material#
# Add a modal acoustic analysis to the model
model.AddModalAcousticAnalysis()
# Set the unit system to Standard MKS
app.ExtAPI.Application.ActiveUnitSystem = MechanicalUnitSystem.StandardMKS
# Import the water material from the specified XML file
materials.Import(mat_path)
<System.Collections.Generic.List[Material] object at 0x7fdf684c08c0>
Assign material to solid bodies#
def get_solid_set_material(name: str) -> None:
"""Get the solid body by name and assign the material.
Parameters
----------
name : str
The name of the solid body to get.
"""
# Get the solid body by name
solid = [
i
for i in geometry.GetChildren[Ansys.ACT.Automation.Mechanical.Body](True)
if i.Name == name
][0]
# Assign material water to acoustic parts
solid.Material = "WATER"
# Assign material water to acoustic parts for solids 1 to 4
for i in range(1, 5):
solid_name = f"Solid{i}"
get_solid_set_material(solid_name)
Add mesh methods and sizings#
Create a function to get the named selection by name
def get_named_selection(name: str) -> Ansys.ACT.Automation.Mechanical.NamedSelection:
"""Get the named selection by name.
Parameters
----------
name : str
The name of the named selection to get.
Returns
-------
Ansys.ACT.Automation.Mechanical.NamedSelection
The named selection object.
"""
return [
child
for child in named_selections.GetChildren[
Ansys.ACT.Automation.Mechanical.NamedSelection
](True)
if child.Name == name
][0]
Create a function to set the mesh properties
def set_mesh_properties(
mesh_element,
named_selection,
method_type=None,
element_size=None,
behavior=None,
):
"""Set the properties for mesh automatic methods and sizings.
Parameters
----------
mesh_element
The mesh element to set properties for.
named_selection : Ansys.ACT.Automation.Mechanical.NamedSelection
The named selection to set the location for the mesh element.
method_type : MethodType, optional
The method type for the mesh (default is None).
element_size : Quantity, optional
The element size for the mesh (default is None).
behavior : SizingBehavior, optional
The sizing behavior for the mesh (default is None).
"""
mesh_element.Location = named_selection
if method_type:
mesh_element.Method = method_type
if element_size:
mesh_element.ElementSize = element_size
if behavior:
mesh_element.Behavior = behavior
Add automatic mesh methods
mesh.ElementOrder = ElementOrder.Quadratic
method1 = mesh.AddAutomaticMethod()
acst_bodies = get_named_selection("Acoustic_bodies")
# Set the automatic method location to the acoustic bodies and the method type to AllTriAllTet
set_mesh_properties(method1, acst_bodies, MethodType.AllTriAllTet)
# Add an automatic mesh method
method2 = mesh.AddAutomaticMethod()
top_bodies = get_named_selection("top_bodies")
# Set the automatic method location to the top bodies and the method type to Automatic
set_mesh_properties(method2, top_bodies, MethodType.Automatic)
Add mesh sizing
sizing1 = mesh.AddSizing()
# Set the mesh sizing location to the top bodies, the element size to 0.2m, and
# the sizing behavior to hard
set_mesh_properties(
sizing1, top_bodies, element_size=Quantity("0.2 [m]"), behavior=SizingBehavior.Hard
)
sizing2 = mesh.AddSizing()
# Set the mesh sizing location to the acoustic bodies, the element size to 0.2m, and
# the sizing behavior to hard
set_mesh_properties(
sizing2, acst_bodies, element_size=Quantity("0.2 [m]"), behavior=SizingBehavior.Hard
)
Add a mesh method for the container bodies
# Add an automatic mesh method
method3 = mesh.AddAutomaticMethod()
container_bodies = get_named_selection("container_bodies")
# Set the automatic method location to the container bodies and the method type to Sweep
set_mesh_properties(method3, container_bodies, MethodType.Sweep)
# Set the source target selection to 4
method3.SourceTargetSelection = 4
Generate the mesh and display the image
mesh.GenerateMesh()
set_camera_and_display_image(camera, graphics, settings_720p, output_path, "mesh.png")

Set up the contact regions in the connection group#
Create a function to set the contact region properties
def set_contact_region_properties(
contact_region,
source_location,
target_location,
contact_formulation=ContactFormulation.MPC,
contact_behavior=ContactBehavior.Asymmetric,
pinball_region=ContactPinballType.Radius,
pinball_radius=Quantity("0.25 [m]"),
set_target_before_src=False,
):
"""Set the properties for the contact region.
Parameters
----------
contact_region : Ansys.ACT.Automation.Mechanical.ContactRegion
The contact region to set properties for.
source_location : Ansys.ACT.Automation.Mechanical.NamedSelection
The source location for the contact region.
target_location : Ansys.ACT.Automation.Mechanical.NamedSelection
The target location for the contact region.
contact_formulation : ContactFormulation, optional
The contact formulation for the contact region (default is MPC).
contact_behavior : ContactBehavior, optional
The contact behavior for the contact region (default is Asymmetric).
pinball_region : ContactPinballType, optional
The pinball region type for the contact region (default is Radius).
pinball_radius : Quantity, optional
The pinball radius for the contact region (default is 0.25 m).
set_target_before_src : bool, optional
Whether to set the target location before the source location (default is False).
"""
# If the target location is set before the source location
if set_target_before_src:
contact_region.TargetLocation = get_named_selection(target_location)
contact_region.SourceLocation = source_location
else:
contact_region.SourceLocation = get_named_selection(source_location)
contact_region.TargetLocation = get_named_selection(target_location)
contact_region.ContactFormulation = contact_formulation
contact_region.Behavior = contact_behavior
contact_region.PinballRegion = pinball_region
contact_region.PinballRadius = pinball_radius
Add contact regions and set their properties
# Add a connection group to the model
connection_group = connections.AddConnectionGroup()
# Add the first contact region to the connection group
contact_region_1 = connection_group.AddContactRegion()
# Set the source location to the Cont_V1 named selection and the target location to the Cont_face1
# named selection
set_contact_region_properties(contact_region_1, "Cont_V1", "Cont_face1")
# Add the second contact region to the connection group
contact_region_2 = connection_group.AddContactRegion()
# Set the source location to the Cont_V2 named selection and the target location to the Cont_face2
# named selection
set_contact_region_properties(contact_region_2, "Cont_V2", "Cont_face2")
# Add the third contact region to the connection group
contact_region_3 = connection_group.AddContactRegion()
# Set the source location to the Cont_V3 named selection and the target location to the Cont_face3
# named selection
set_contact_region_properties(contact_region_3, "Cont_V3", "Cont_face3")
# Set the selection manager
sel_manager = app.ExtAPI.SelectionManager
# Get the contact vertex from the geometry
contact_vertex = DataModel.GeoData.Assemblies[0].Parts[1].Bodies[0].Vertices[3]
# Create a selection info object for the contact vertex
contact_vertex_4 = sel_manager.CreateSelectionInfo(SelectionTypeEnum.GeometryEntities)
# Set the contact vertex as the selected entity
contact_vertex_4.Entities = [contact_vertex]
# Add the fourth contact region to the connection group
contact_region_4 = connection_group.AddContactRegion()
# Set the target location to the contact vertex and the source location to the Cont_face4
# named selection
set_contact_region_properties(
contact_region_4, contact_vertex_4, "Cont_face4", set_target_before_src=True
)
Fully define the modal multiphysics region with two physics regions
# Get the modal acoustic analysis object
modal_acst = DataModel.Project.Model.Analyses[0]
# Get the acoustic region from the modal acoustic analysis
acoustic_region = modal_acst.Children[2]
# Set the acoustic region to the acoustic bodies named selection
acoustic_region.Location = acst_bodies
# Add a physics region to the modal acoustic analysis
structural_region = modal_acst.AddPhysicsRegion()
# Set the physics region to structural and rename it based on the definition
structural_region.Structural = True
structural_region.RenameBasedOnDefinition()
# Set the structural region to the structural bodies named selection
structural_region.Location = get_named_selection("Structural_bodies")
Set up the analysis settings#
# Get the analysis settings from the modal acoustic analysis
analysis_settings = modal_acst.Children[1]
# Set the analysis settings properties
analysis_settings.MaximumModesToFind = 12
analysis_settings.SearchRangeMinimum = Quantity("0.1 [Hz]")
analysis_settings.SolverType = SolverType.Unsymmetric
analysis_settings.GeneralMiscellaneous = True
analysis_settings.CalculateReactions = True
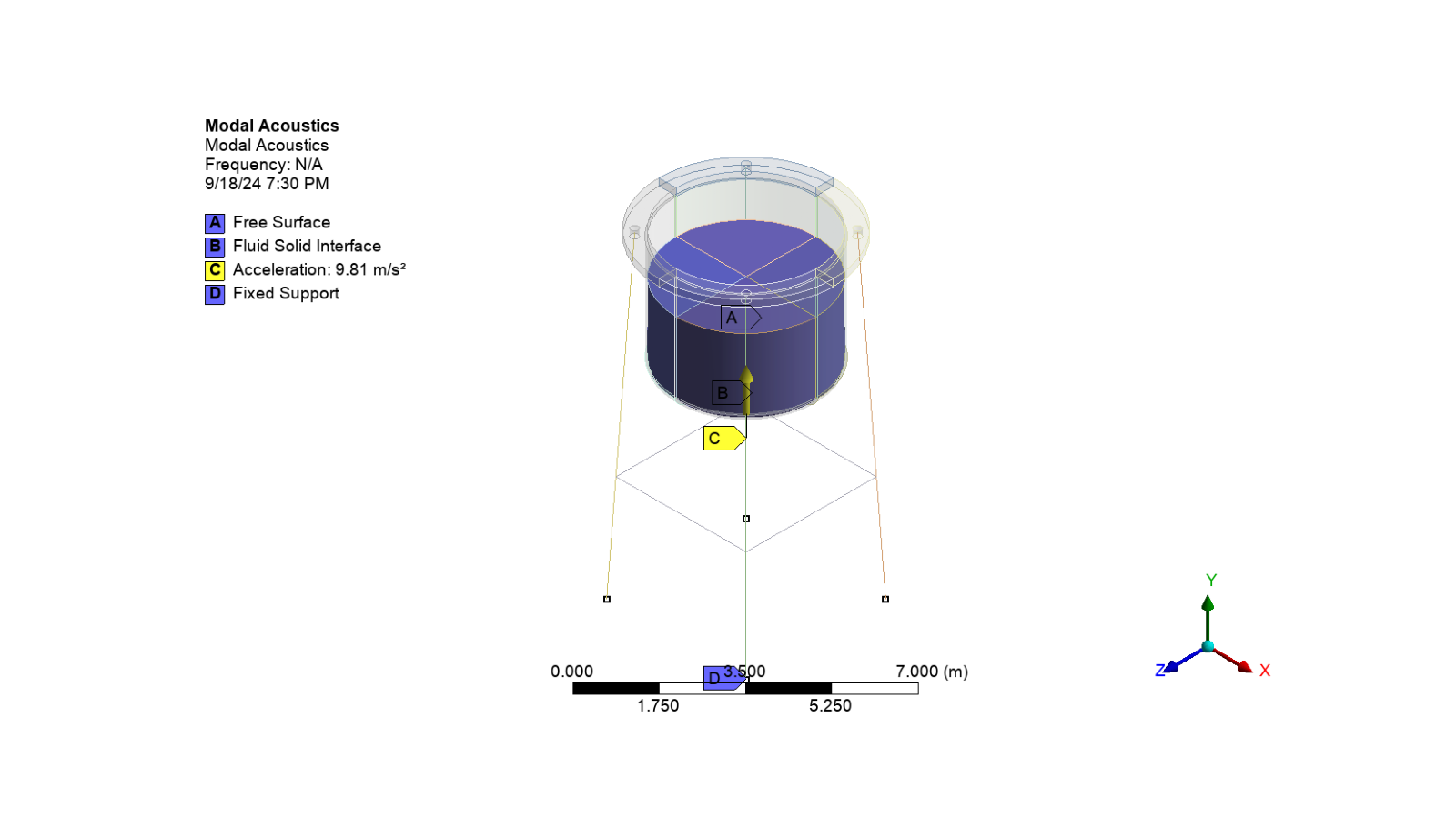
Set the boundary conditions and load#
# Add an acoustic free surface to the modal acoustic analysis
free_surface = modal_acst.AddAcousticFreeSurface()
# Set the free surface location to the free faces named selection
free_surface.Location = get_named_selection("Free_faces")
Add the solid fluid interface
# Add a fluid solid interface to the modal acoustic analysis
fsi_object = modal_acst.AddFluidSolidInterface()
# Set the fluid solid interface location to the FSI faces named selection
fsi_object.Location = get_named_selection("FSI_faces")
Add the gravity load
# Add gravity to the modal acoustic analysis
acceleration = modal_acst.AddAcceleration()
# Set the components and the Y-component of the acceleration to
# 9.81 m/s^2 (gravitational acceleration)
acceleration.DefineBy = LoadDefineBy.Components
acceleration.YComponent.Output.DiscreteValues = [Quantity("9.81 [m sec^-1 sec^-1]")]
Add fixed support
# Get vertices from the geometry
vertices = []
for body in range(0, 4):
vertices.append(DataModel.GeoData.Assemblies[0].Parts[1].Bodies[body].Vertices[0])
# Create a selection info object for the geometry entities
fvert = sel_manager.CreateSelectionInfo(SelectionTypeEnum.GeometryEntities)
# Set the list of vertices as the geometry entities
fvert.Entities = vertices
# Add a fixed support to the modal acoustic analysis
fixed_support = modal_acst.AddFixedSupport()
# Set the location of the fixed support to the geometry entities
fixed_support.Location = fvert
# Activate the modal acoustic analysis and display the image
modal_acst.Activate()
set_camera_and_display_image(
camera, graphics, settings_720p, output_path, "geometry.png"
)
Add results to the solution#
# Get the solution object from the modal acoustic analysis
solution = model.Analyses[0].Solution
# Add 10 total deformation results, setting the mode for every result except the first
total_deformation_results = []
for mode in range(1, 11):
total_deformation = solution.AddTotalDeformation()
if mode > 1:
total_deformation.Mode = mode
total_deformation_results.append(total_deformation)
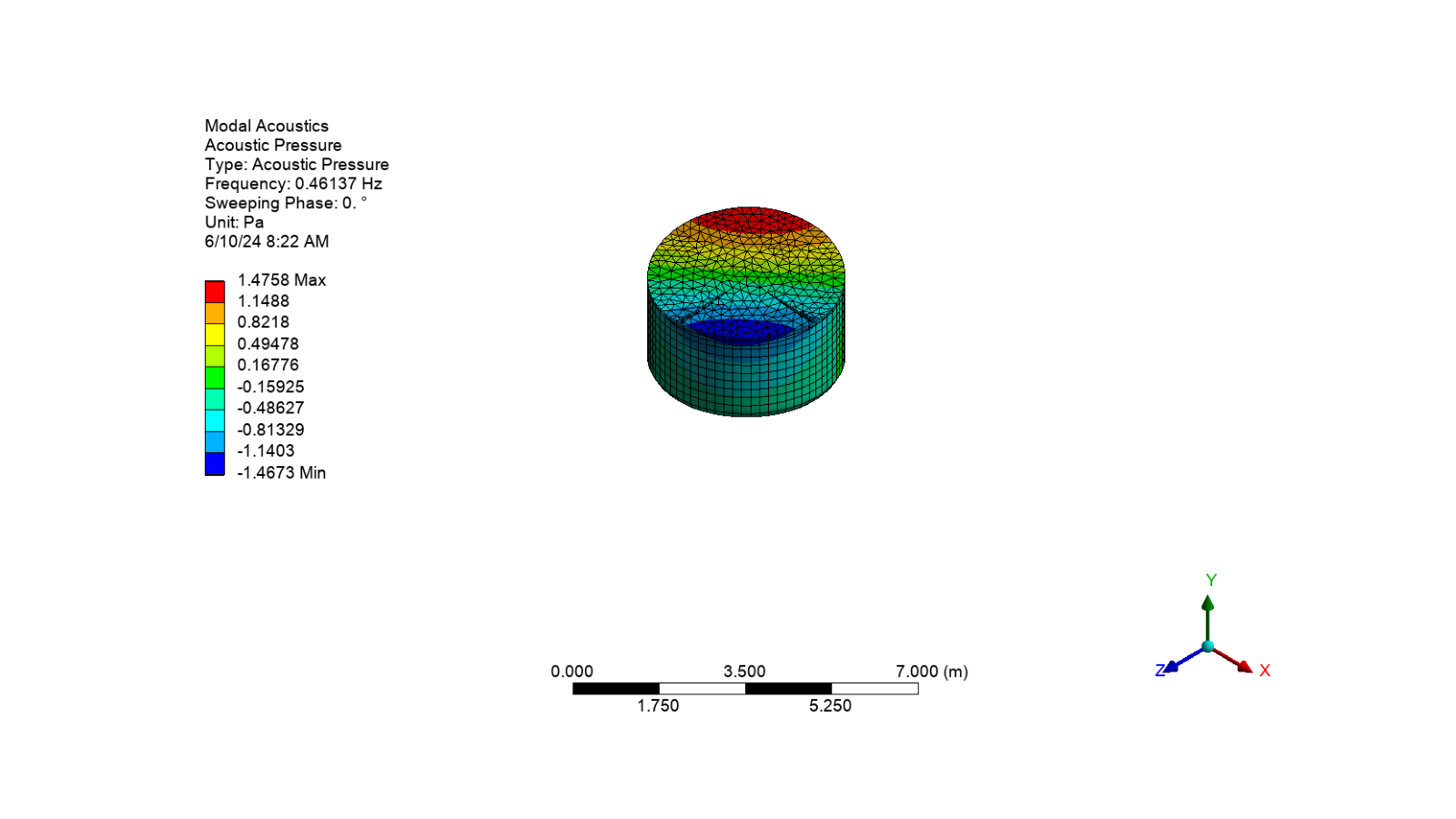
Add the acoustic pressure result to the solution
acoustic_pressure_result = solution.AddAcousticPressureResult()
Scope the force reaction to the fixed support
# Add a force reaction to the solution
force_reaction_1 = solution.AddForceReaction()
# Set the boundary condition selection to the fixed support
force_reaction_1.BoundaryConditionSelection = fixed_support
Solve the solution#
solution.Solve(True)
Show messages#
# Print all messages from Mechanical
app.messages.show()
Severity: Info
DisplayString: The requested license was received from the License Manager after 22 seconds.
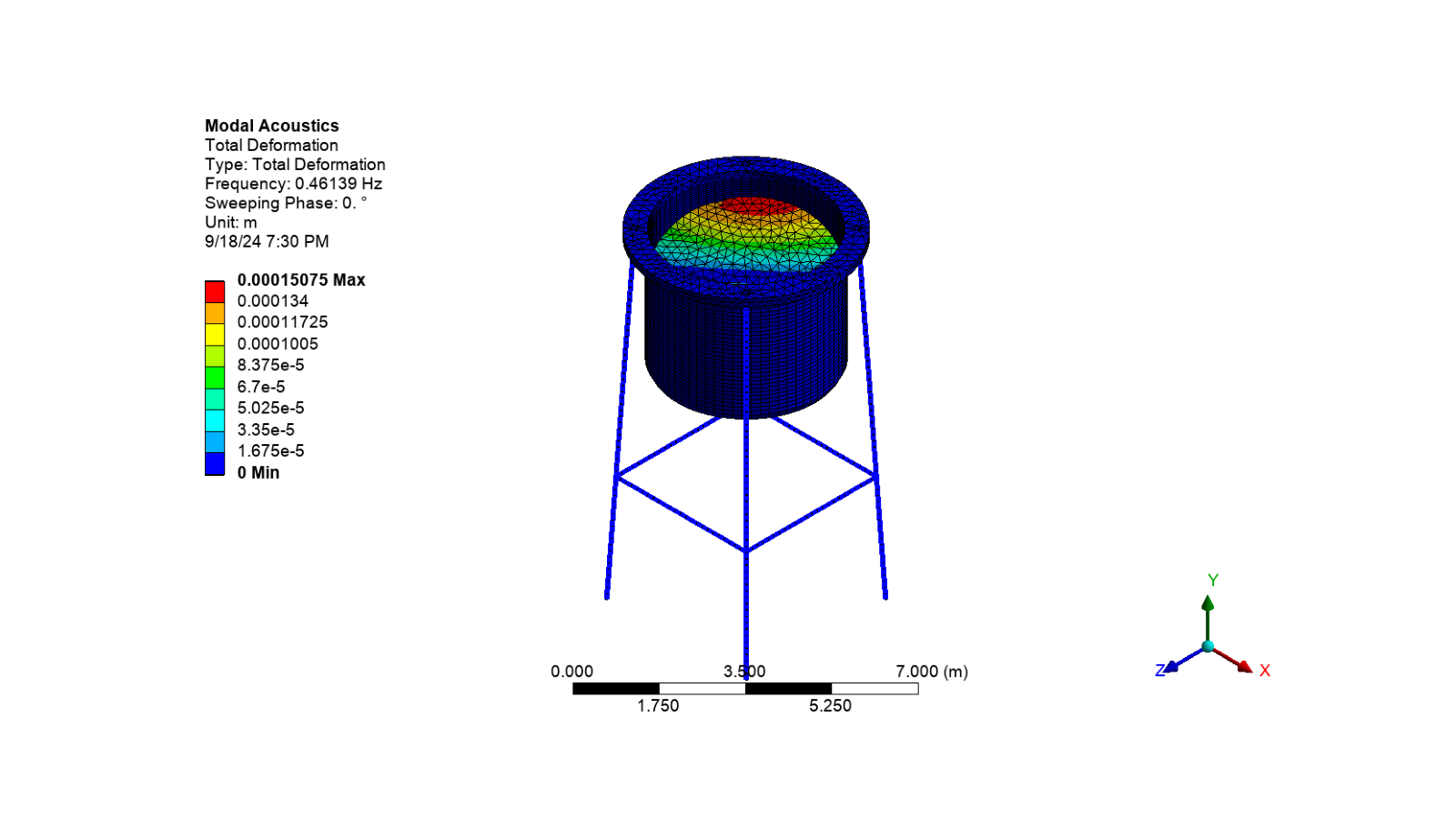
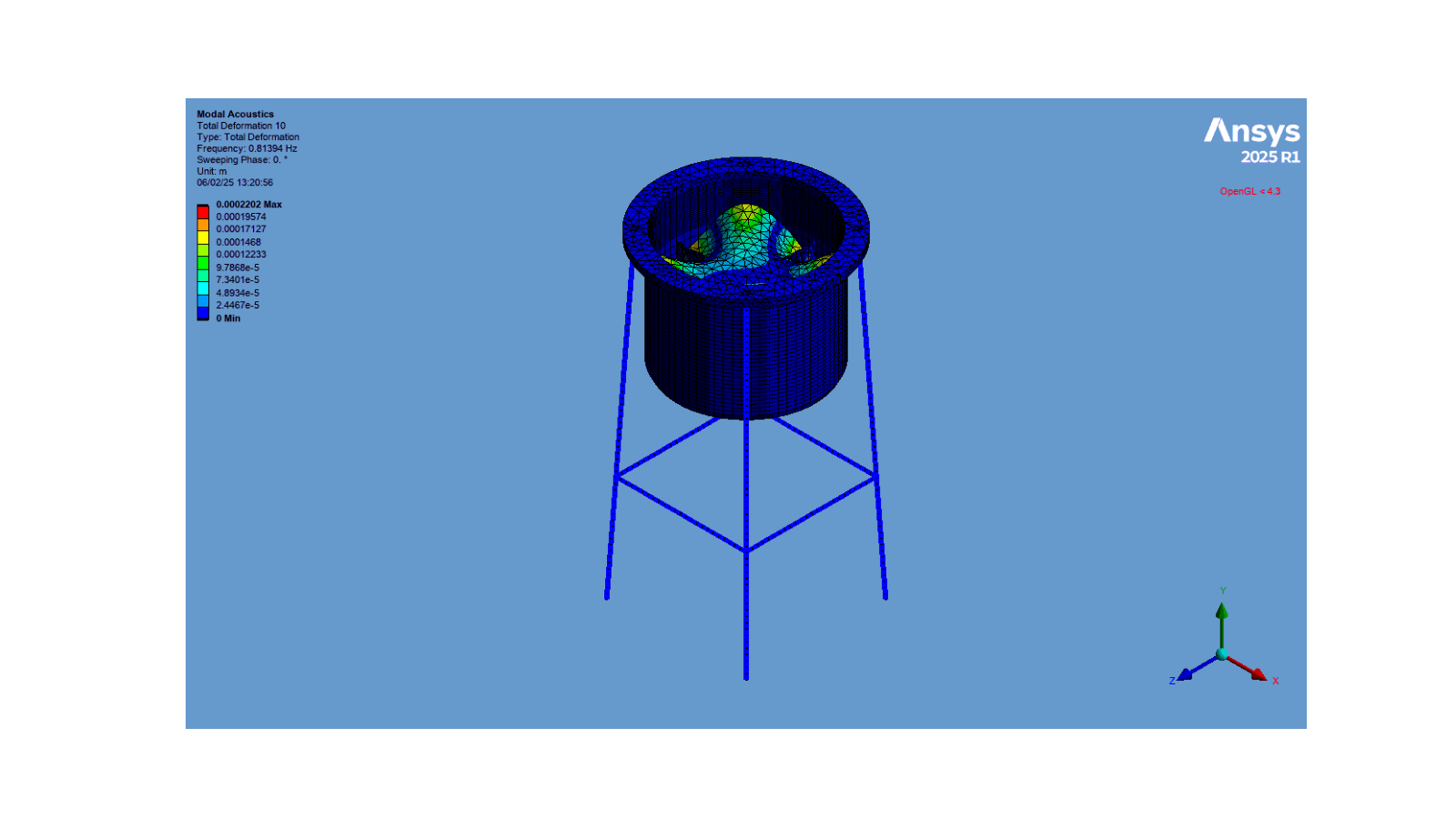
Display the results#
Activate the first total deformation result and display the image
app.Tree.Activate([total_deformation_results[0]])
set_camera_and_display_image(
camera, graphics, settings_720p, output_path, "total_deformation.png", set_fit=True
)
Activate the acoustic pressure result and display the image
app.Tree.Activate([acoustic_pressure_result])
set_camera_and_display_image(
camera, graphics, settings_720p, output_path, "acoustic_pressure.png"
)
Display all modal frequency, force reaction, and acoustic pressure values
print("Modal Acoustic Results")
print("----------------------")
# Print the frequency values for each mode
for index, result in enumerate(total_deformation_results, start=1):
frequency_value = result.ReportedFrequency.Value
print(f"Frequency for mode {index}: ", frequency_value)
# Get the maximum and minimum values of the acoustic pressure result
pressure_result_max = acoustic_pressure_result.Maximum.Value
pressure_result_min = acoustic_pressure_result.Minimum.Value
# Get the force reaction values for the x and z axes
force_reaction_1_x = force_reaction_1.XAxis.Value
force_reaction_1_z = force_reaction_1.ZAxis.Value
# Print the results
print("Acoustic pressure minimum : ", pressure_result_min)
print("Acoustic pressure Maximum : ", pressure_result_max)
print("Force reaction x-axis : ", force_reaction_1_x)
print("Force reaction z-axis : ", force_reaction_1_z)
Modal Acoustic Results
----------------------
Frequency for mode 1: 0.4609727460952169
Frequency for mode 2: 0.4613438758352993
Frequency for mode 3: 0.6175086653420759
Frequency for mode 4: 0.6183357345726617
Frequency for mode 5: 0.6914163784963896
Frequency for mode 6: 0.7249680986602728
Frequency for mode 7: 0.7263260128918371
Frequency for mode 8: 0.8111325988000792
Frequency for mode 9: 0.8118765565041386
Frequency for mode 10: 0.8141545604004452
Acoustic pressure minimum : -1.4704679250717163
Acoustic pressure Maximum : 1.4743285179138184
Force reaction x-axis : -12.093265792066333
Force reaction z-axis : 0.8164286363321553
Create a function to update the animation frames
def update_animation(frame: int) -> list[mpimg.AxesImage]:
"""Update the animation frame for the GIF.
Parameters
----------
frame : int
The frame number to update the animation.
Returns
-------
list[mpimg.AxesImage]
A list containing the updated image for the animation.
"""
# Seeks to the given frame in this sequence file
gif.seek(frame)
# Set the image array to the current frame of the GIF
image.set_data(gif.convert("RGBA"))
# Return the updated image
return [image]
Play the total deformation animation
# Set the animation export format to GIF
animation_export_format = (
Ansys.Mechanical.DataModel.Enums.GraphicsAnimationExportFormat.GIF
)
# Set the export settings for the animation
settings_720p = Ansys.Mechanical.Graphics.AnimationExportSettings()
settings_720p.Width = 1280
settings_720p.Height = 720
# Export the total deformation animation for the last result
deformation_gif = (
output_path / f"total_deformation_{len(total_deformation_results)}.gif"
)
total_deformation_results[-1].ExportAnimation(
str(deformation_gif), animation_export_format, settings_720p
)
# Open the GIF file and create an animation
gif = Image.open(deformation_gif)
# Set the subplots for the animation and turn off the axis
figure, axes = plt.subplots(figsize=(16, 9))
axes.axis("off")
# Change the color of the image
image = axes.imshow(gif.convert("RGBA"))
# Create the animation using the figure, update_animation function, and the GIF frames
# Set the interval between frames to 200 milliseconds and repeat the animation
FuncAnimation(
figure,
update_animation,
frames=range(gif.n_frames),
interval=100,
repeat=True,
blit=True,
)
# Show the animation
plt.show()
Print the project tree#
app.print_tree()
├── Project
| ├── Model
| | ├── Geometry Imports (✓)
| | | ├── Geometry Import (✓)
| | ├── Geometry (✓)
| | | ├── Part
| | | | ├── Solid
| | | | ├── Solid1
| | | | ├── Solid
| | | | ├── Solid2
| | | | ├── Solid
| | | | ├── Solid
| | | | ├── Solid
| | | | ├── Solid3
| | | | ├── Solid
| | | | ├── Solid4
| | | | ├── Solid
| | | | ├── Solid
| | | | ├── Solid
| | | | ├── Solid
| | | | ├── Solid
| | | | ├── Solid
| | | ├── Part 2
| | | | ├── Line Body
| | | | ├── Line Body
| | | | ├── Line Body
| | | | ├── Line Body
| | | | ├── Line Body
| | ├── Materials (✓)
| | | ├── Structural Steel (✓)
| | | ├── Air (✓)
| | | ├── WATER (✓)
| | ├── Cross Sections (✓)
| | | ├── Circular1 (✓)
| | ├── Coordinate Systems (✓)
| | | ├── Global Coordinate System (✓)
| | ├── Remote Points (✓)
| | ├── Connections (✓)
| | | ├── Connection Group (✓)
| | | | ├── Contact Region (✓)
| | | | ├── Contact Region 2 (✓)
| | | | ├── Contact Region 3 (✓)
| | | | ├── Contact Region 4 (✓)
| | ├── Mesh Workflows (✓)
| | ├── Mesh (✓)
| | | ├── Patch Conforming Method (✓)
| | | ├── Automatic Method (✓)
| | | ├── Body Sizing (✓)
| | | ├── Body Sizing 2 (✓)
| | | ├── Sweep Method (✓)
| | ├── Named Selections
| | | ├── Acoustic_bodies (✓)
| | | ├── Structural_bodies (✓)
| | | ├── Line_bodies (✓)
| | | ├── Free_faces (✓)
| | | ├── FSI_faces (✓)
| | | ├── top_bodies (✓)
| | | ├── container_bodies (✓)
| | | ├── Cont_V1 (✓)
| | | ├── Cont_V2 (✓)
| | | ├── Cont_V3 (✓)
| | | ├── Cont_face1 (✓)
| | | ├── Cont_face2 (✓)
| | | ├── Cont_face3 (✓)
| | | ├── Cont_face4 (✓)
| | ├── Modal Acoustics (✓)
| | | ├── Pre-Stress (None) (✓)
| | | ├── Analysis Settings (✓)
| | | ├── Acoustics Region (✓)
| | | ├── Structural Region (✓)
| | | ├── Acceleration (✓)
| | | ├── Free Surface (✓)
| | | ├── Fluid Solid Interface (✓)
| | | ├── Fixed Support (✓)
| | | ├── Solution (✓)
| | | | ├── Solution Information (✓)
| | | | ├── Total Deformation (✓)
| | | | ├── Total Deformation 2 (✓)
| | | | ├── Total Deformation 3 (✓)
| | | | ├── Total Deformation 4 (✓)
... truncating after 80 lines
Clean up the project#
# Save the project file
mechdat_file = output_path / "modal_acoustics.mechdat"
app.save(str(mechdat_file))
# Close the app
app.close()
# Delete the example files
delete_downloads()
True
Total running time of the script: (0 minutes 49.057 seconds)