Note
Go to the end to download the full example code.
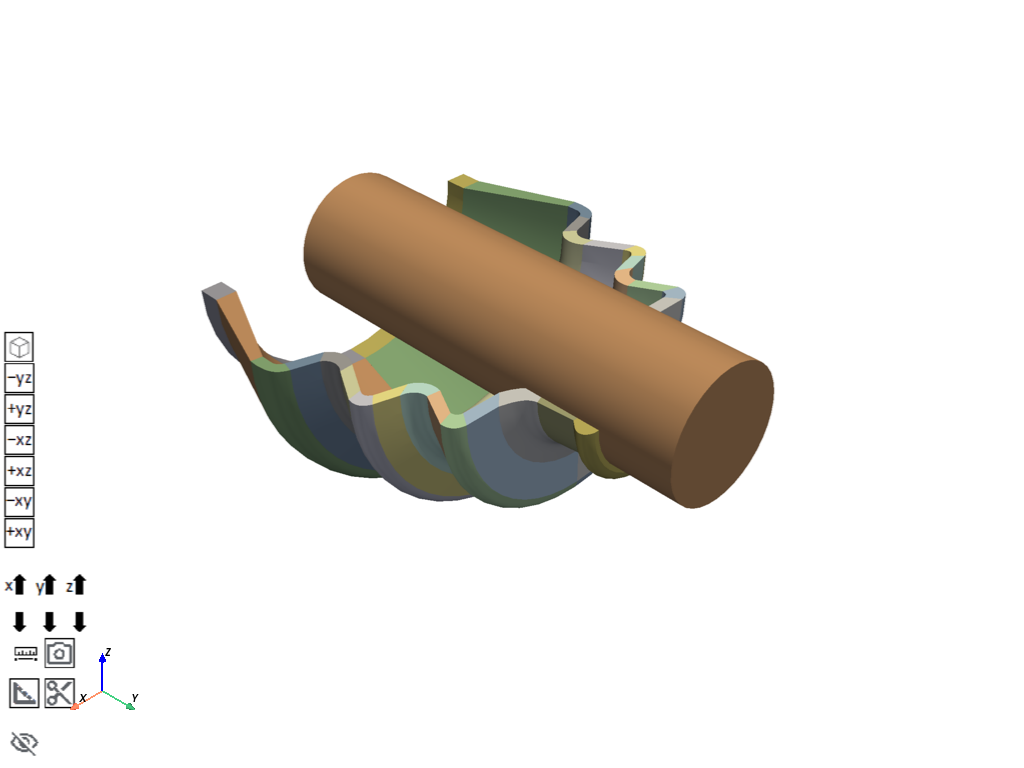
Nonlinear Analysis of a Rubber Boot Seal Model#
This example demonstrates a nonlinear 3D analysis of a rubber boot seal to:
Create a rigid-flexible contact pair between a rigid shaft and a rubber boot part.
Specify ramped effects using the On Gauss Point Detection Method to update contact stiffness at each iteration.
Specify contact pairs at the inner and outer surfaces of the rubber boot.
Specify non-ramped effects using the Nodal-Projected Normal From Contact Detection Method to update contact stiffness at each iteration.
Import necessary libraries#
import os
from PIL import Image
from ansys.mechanical.core import App
from ansys.mechanical.core.examples import delete_downloads, download_file
from matplotlib import image as mpimg
from matplotlib import pyplot as plt
from matplotlib.animation import FuncAnimation
Embed mechanical and set global variables
app = App()
app.update_globals(globals())
print(app)
cwd = os.path.join(os.getcwd(), "out")
def display_image(image_name):
plt.figure(figsize=(16, 9))
plt.imshow(mpimg.imread(os.path.join(cwd, image_name)))
plt.xticks([])
plt.yticks([])
plt.axis("off")
plt.show()
Ansys Mechanical [Ansys Mechanical Enterprise]
Product Version:251
Software build date: 11/27/2024 09:34:44
Configure graphics for image export#
Graphics.Camera.SetSpecificViewOrientation(ViewOrientationType.Iso)
Graphics.Camera.SetFit()
image_export_format = GraphicsImageExportFormat.PNG
settings_720p = Ansys.Mechanical.Graphics.GraphicsImageExportSettings()
settings_720p.Resolution = GraphicsResolutionType.EnhancedResolution
settings_720p.Background = GraphicsBackgroundType.White
settings_720p.Width = 1280
settings_720p.Height = 720
settings_720p.CurrentGraphicsDisplay = False
Download geometry and materials files#
geometry_path = download_file(
"example_05_td26_Rubber_Boot_Seal.agdb", "pymechanical", "00_basic"
)
mat_path = download_file("example_05_Boot_Mat.xml", "pymechanical", "00_basic")
Import geometry and material#
Import material
materials = Model.Materials
materials.Import(mat_path)
print("Material import done !")
Material import done !
Import geometry
geometry_import = Model.GeometryImportGroup.AddGeometryImport()
geometry_import_format = (
Ansys.Mechanical.DataModel.Enums.GeometryImportPreference.Format.Automatic
)
geometry_import_preferences = Ansys.ACT.Mechanical.Utilities.GeometryImportPreferences()
geometry_import_preferences.ProcessNamedSelections = True
geometry_import_preferences.ProcessCoordinateSystems = True
geometry_import.Import(
geometry_path, geometry_import_format, geometry_import_preferences
)
app.plot()
/env/lib/python3.11/site-packages/pyvista/core/filters/data_object.py:179: PyVistaDeprecationWarning: The default value of `inplace` for the filter `PolyData.transform` will change in the future. Previously it defaulted to `True`, but will change to `False`. Explicitly set `inplace` to `True` or `False` to silence this warning.
warnings.warn(msg, PyVistaDeprecationWarning)
Setup the Analysis#
Set up the unit system
ExtAPI.Application.ActiveUnitSystem = MechanicalUnitSystem.StandardNMM
ExtAPI.Application.ActiveAngleUnit = AngleUnitType.Radian
Store all main tree nodes as variables
GEOM = Model.Geometry
PRT1 = [x for x in Tree.AllObjects if x.Name == "Part"][0]
PRT2 = [x for x in Tree.AllObjects if x.Name == "Solid"][1]
CS_GRP = Model.CoordinateSystems
GCS = CS_GRP.Children[0]
Add static structural analysis
Model.AddStaticStructuralAnalysis()
STAT_STRUC = Model.Analyses[0]
ANA_SETTING = STAT_STRUC.Children[0]
STAT_STRUC_SOLN = STAT_STRUC.Solution
SOLN_INFO = STAT_STRUC_SOLN.SolutionInformation
Define named selection and coordinate system
NS_GRP = ExtAPI.DataModel.Project.Model.NamedSelections
TOP_FACE = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Top_Face"
][0]
BOTTOM_FACE = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Bottom_Face"
][0]
SYMM_FACES30 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Symm_Faces30"
][0]
FACES2 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Faces2"
][0]
CYL_FACES2 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Cyl_Faces2"
][0]
RUBBER_BODIES30 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Rubber_Bodies30"
][0]
INNER_FACES30 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Inner_Faces30"
][0]
OUTER_FACES30 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Outer_Faces30"
][0]
SHAFT_FACE = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Shaft_Face"
][0]
SYMM_FACES15 = [
i
for i in NS_GRP.GetChildren[Ansys.ACT.Automation.Mechanical.NamedSelection](True)
if i.Name == "Symm_Faces15"
][0]
LCS1 = CS_GRP.AddCoordinateSystem()
LCS1.OriginY = Quantity("97[mm]")
Assign material
PRT1.Material = "Boot"
PRT2.StiffnessBehavior = StiffnessBehavior.Rigid
Define connections
CONN_GRP = Model.Connections
CONT_REG1 = CONN_GRP.AddContactRegion()
CONT_REG1.TargetLocation = SHAFT_FACE
CONT_REG1.SourceLocation = INNER_FACES30
CONT_REG1.ContactType = ContactType.Frictional
CONT_REG1.FrictionCoefficient = 0.2
CONT_REG1.Behavior = ContactBehavior.Asymmetric
CONT_REG1.SmallSliding = ContactSmallSlidingType.Off
CONT_REG1.DetectionMethod = ContactDetectionPoint.OnGaussPoint
CONT_REG1.UpdateStiffness = UpdateContactStiffness.EachIteration
CONT_REG1.InterfaceTreatment = ContactInitialEffect.AddOffsetRampedEffects
CONT_REG1.TargetGeometryCorrection = TargetCorrection.Smoothing
CONT_REG1.TargetOrientation = TargetOrientation.Cylinder
CONT_REG1.TargetStartingPoint = GCS
CONT_REG1.TargetEndingPoint = LCS1
CONTS = CONN_GRP.Children[0]
CONT_REG2 = CONTS.AddContactRegion()
CONT_REG2.SourceLocation = INNER_FACES30
CONT_REG2.TargetLocation = INNER_FACES30
CONT_REG2.ContactType = ContactType.Frictional
CONT_REG2.FrictionCoefficient = 0.2
CONT_REG2.Behavior = ContactBehavior.Asymmetric
CONT_REG2.SmallSliding = ContactSmallSlidingType.Off
CONT_REG2.DetectionMethod = ContactDetectionPoint.NodalProjectedNormalFromContact
CONT_REG2.UpdateStiffness = UpdateContactStiffness.EachIteration
CONT_REG2.NormalStiffnessValueType = ElementControlsNormalStiffnessType.Factor
CONT_REG2.NormalStiffnessFactor = 1
CONT_REG3 = CONTS.AddContactRegion()
CONT_REG3.SourceLocation = OUTER_FACES30
CONT_REG3.TargetLocation = OUTER_FACES30
CONT_REG3.ContactType = ContactType.Frictional
CONT_REG3.FrictionCoefficient = 0.2
CONT_REG3.Behavior = ContactBehavior.Asymmetric
CONT_REG3.SmallSliding = ContactSmallSlidingType.Off
CONT_REG3.DetectionMethod = ContactDetectionPoint.NodalProjectedNormalFromContact
CONT_REG3.UpdateStiffness = UpdateContactStiffness.EachIteration
CONT_REG3.NormalStiffnessValueType = ElementControlsNormalStiffnessType.Factor
CONT_REG3.NormalStiffnessFactor = 1
Mesh#
MSH = Model.Mesh
FACE_MSH = MSH.AddFaceMeshing()
FACE_MSH.Location = SHAFT_FACE
FACE_MSH.InternalNumberOfDivisions = 1
MSH_SIZE = MSH.AddSizing()
MSH_SIZE.Location = SYMM_FACES15
MSH_SIZE.ElementSize = Quantity("2 [mm]")
MSH.ElementOrder = ElementOrder.Linear
MSH.Resolution = 2
MSH.GenerateMesh()
Graphics.ExportImage(os.path.join(cwd, "mesh.png"), image_export_format, settings_720p)
display_image("mesh.png")
Define remote points#
scope them to the top and bottom faces of rigid shaft
RMPT01 = Model.AddRemotePoint()
RMPT01.Location = BOTTOM_FACE
RMPT01.Behavior = LoadBehavior.Rigid
RMPT02 = Model.AddRemotePoint()
RMPT02.Location = TOP_FACE
RMPT02.Behavior = LoadBehavior.Rigid
Analysis settings#
ANA_SETTING.Activate()
ANA_SETTING.LargeDeflection = True
ANA_SETTING.Stabilization = StabilizationType.Off
ANA_SETTING.NumberOfSteps = 2
ANA_SETTING.CurrentStepNumber = 1
ANA_SETTING.AutomaticTimeStepping = AutomaticTimeStepping.On
ANA_SETTING.DefineBy = TimeStepDefineByType.Substeps
ANA_SETTING.InitialSubsteps = 5
ANA_SETTING.MinimumSubsteps = 5
ANA_SETTING.MaximumSubsteps = 1000
ANA_SETTING.StoreResultsAt = TimePointsOptions.EquallySpacedPoints
ANA_SETTING.StoreResulsAtValue = 5
ANA_SETTING.CurrentStepNumber = 2
ANA_SETTING.AutomaticTimeStepping = AutomaticTimeStepping.On
ANA_SETTING.DefineBy = TimeStepDefineByType.Substeps
ANA_SETTING.InitialSubsteps = 10
ANA_SETTING.MinimumSubsteps = 10
ANA_SETTING.MaximumSubsteps = 1000
ANA_SETTING.StoreResultsAt = TimePointsOptions.EquallySpacedPoints
ANA_SETTING.StoreResulsAtValue = 10
ANA_SETTING.CurrentStepNumber = 3
ANA_SETTING.AutomaticTimeStepping = AutomaticTimeStepping.On
ANA_SETTING.DefineBy = TimeStepDefineByType.Substeps
ANA_SETTING.InitialSubsteps = 30
ANA_SETTING.MinimumSubsteps = 30
ANA_SETTING.MaximumSubsteps = 1000
ANA_SETTING.StoreResultsAt = TimePointsOptions.EquallySpacedPoints
ANA_SETTING.StoreResulsAtValue = 20
SOLN_INFO.NewtonRaphsonResiduals = 4
Loads and boundary conditions#
REM_DISP = STAT_STRUC.AddRemoteDisplacement()
REM_DISP.Location = RMPT01
REM_DISP.XComponent.Inputs[0].DiscreteValues = [
Quantity("0 [s]"),
Quantity("1 [s]"),
Quantity("2 [s]"),
Quantity("3 [s]"),
]
REM_DISP.XComponent.Output.DiscreteValues = [
Quantity("0 [mm]"),
Quantity("0 [mm]"),
Quantity("0 [mm]"),
Quantity("0 [mm]"),
]
REM_DISP.YComponent.Inputs[0].DiscreteValues = [
Quantity("0 [s]"),
Quantity("1 [s]"),
Quantity("2 [s]"),
Quantity("3 [s]"),
]
REM_DISP.YComponent.Output.DiscreteValues = [
Quantity("0 [mm]"),
Quantity("0 [mm]"),
Quantity("-10 [mm]"),
Quantity("-10 [mm]"),
]
REM_DISP.ZComponent.Inputs[0].DiscreteValues = [
Quantity("0 [s]"),
Quantity("1 [s]"),
Quantity("2 [s]"),
Quantity("3 [s]"),
]
REM_DISP.ZComponent.Output.DiscreteValues = [
Quantity("0 [mm]"),
Quantity("0 [mm]"),
Quantity("0 [mm]"),
Quantity("0 [mm]"),
]
REM_DISP.RotationX.Inputs[0].DiscreteValues = [
Quantity("0 [s]"),
Quantity("1 [s]"),
Quantity("2 [s]"),
Quantity("3 [s]"),
]
REM_DISP.RotationX.Output.DiscreteValues = [
Quantity("0 [rad]"),
Quantity("0 [rad]"),
Quantity("0 [rad]"),
Quantity("0 [rad]"),
]
REM_DISP.RotationY.Inputs[0].DiscreteValues = [
Quantity("0 [s]"),
Quantity("1 [s]"),
Quantity("2 [s]"),
Quantity("3 [s]"),
]
REM_DISP.RotationY.Output.DiscreteValues = [
Quantity("0 [rad]"),
Quantity("0 [rad]"),
Quantity("0 [rad]"),
Quantity("0 [rad]"),
]
REM_DISP.RotationZ.Inputs[0].DiscreteValues = [
Quantity("0 [s]"),
Quantity("1 [s]"),
Quantity("2 [s]"),
Quantity("3 [s]"),
]
REM_DISP.RotationZ.Output.DiscreteValues = [
Quantity("0 [rad]"),
Quantity("0 [rad]"),
Quantity("0 [rad]"),
Quantity("0.55 [rad]"),
]
FRIC_SUP01 = STAT_STRUC.AddFrictionlessSupport()
FRIC_SUP01.Location = SYMM_FACES30
FRIC_SUP01.Name = "Symmetry_BC"
FRIC_SUP02 = STAT_STRUC.AddFrictionlessSupport()
FRIC_SUP02.Location = FACES2
FRIC_SUP02.Name = "Boot_Bottom_BC"
FRIC_SUP03 = STAT_STRUC.AddFrictionlessSupport()
FRIC_SUP03.Location = CYL_FACES2
FRIC_SUP03.Name = "Boot_Radial_BC"
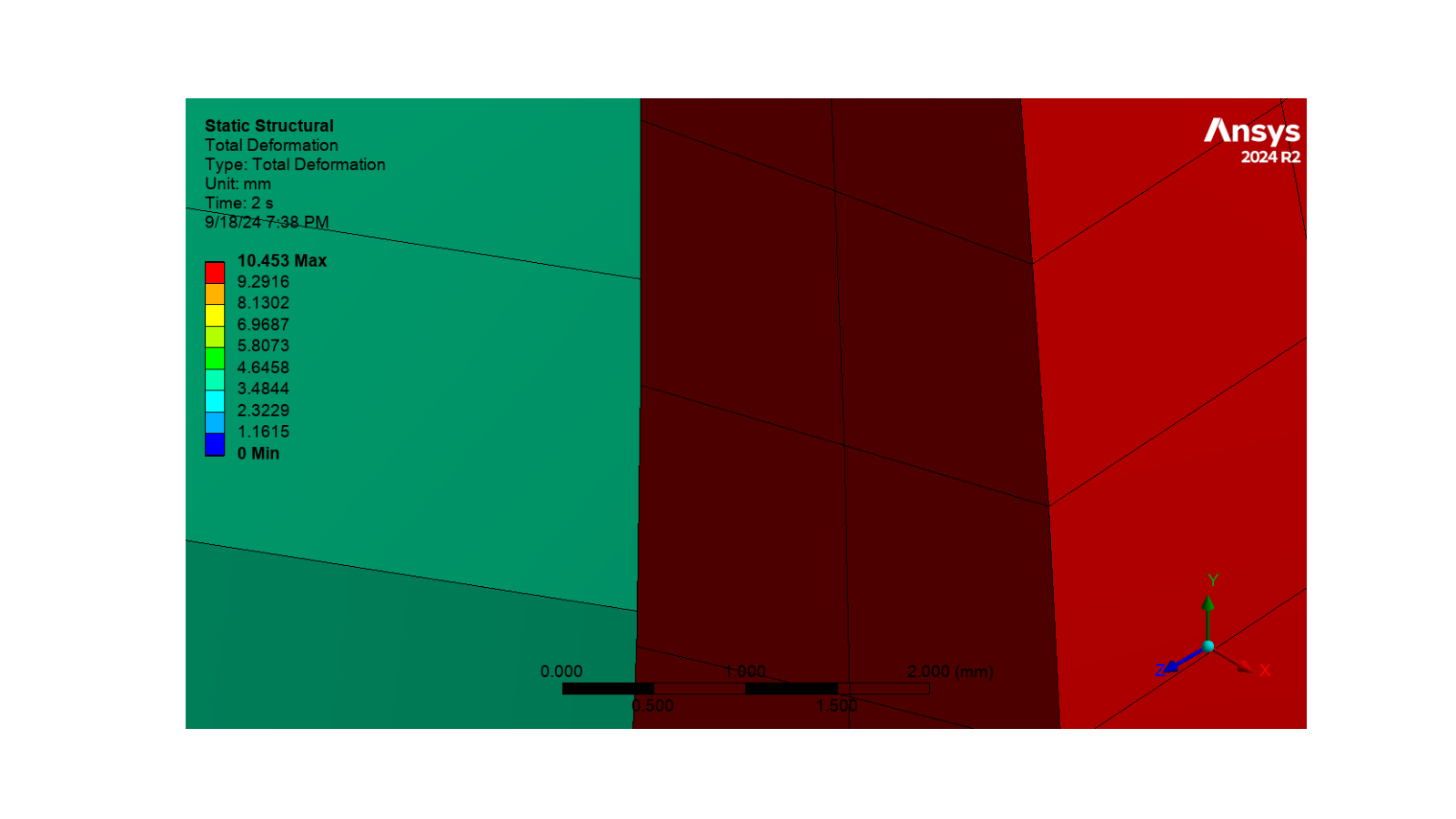
Add results#
TOT_DEF = STAT_STRUC.Solution.AddTotalDeformation()
TOT_DEF.Location = RUBBER_BODIES30
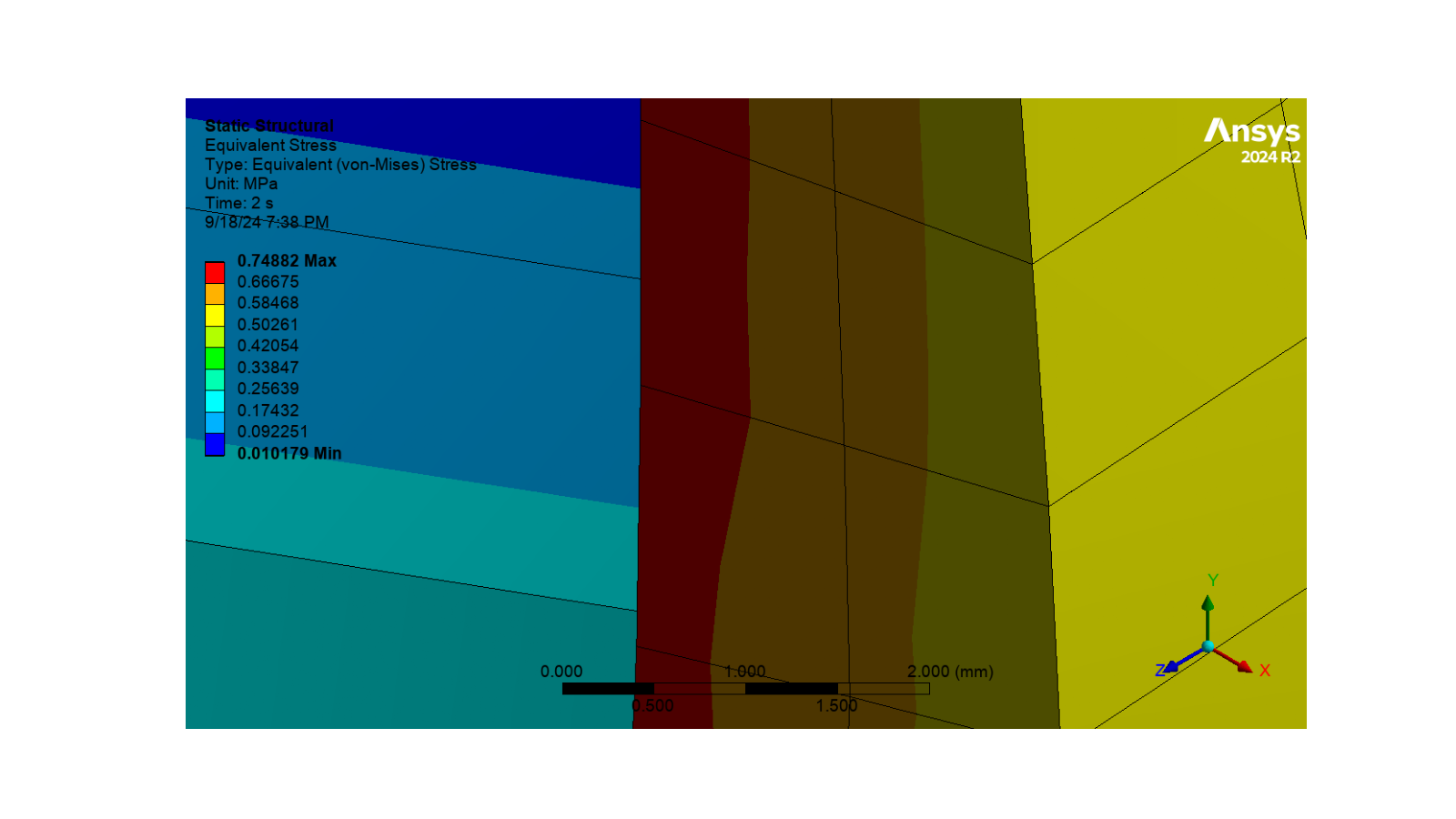
EQV_STRS = STAT_STRUC.Solution.AddEquivalentStress()
EQV_STRS.Location = RUBBER_BODIES30
Solve#
STAT_STRUC.Solution.Solve(True)
Postprocessing#
Total deformation
Tree.Activate([TOT_DEF])
Graphics.ExportImage(
os.path.join(cwd, "totaldeformation.png"), image_export_format, settings_720p
)
display_image("totaldeformation.png")
Equivalent stress
Tree.Activate([EQV_STRS])
Graphics.ExportImage(
os.path.join(cwd, "equivalent_stress.png"), image_export_format, settings_720p
)
display_image("equivalent_stress.png")
Total deformation animation
animation_export_format = (
Ansys.Mechanical.DataModel.Enums.GraphicsAnimationExportFormat.GIF
)
settings_720p = Ansys.Mechanical.Graphics.AnimationExportSettings()
settings_720p.Width = 1280
settings_720p.Height = 720
TOT_DEF.ExportAnimation(
os.path.join(cwd, "totaldeformation.gif"), animation_export_format, settings_720p
)
gif = Image.open(os.path.join(cwd, "totaldeformation.gif"))
fig, ax = plt.subplots(figsize=(16, 9))
ax.axis("off")
img = ax.imshow(gif.convert("RGBA"))
def update(frame):
gif.seek(frame)
img.set_array(gif.convert("RGBA"))
return [img]
ani = FuncAnimation(
fig, update, frames=range(gif.n_frames), interval=200, repeat=True, blit=True
)
plt.show()
Cleanup#
Save project
app.save(os.path.join(cwd, "non-linear-rubber-boot-seal.mechdat"))
app.new()
# delete example file
delete_downloads()
True
Total running time of the script: (1 minutes 54.008 seconds)